Дистанционное сканирование с помощью ультразвукового дальномера
Знакомство с ультразвуковым дальномером HC-SR04.
Ультразвуковой дальномер HC-SR04 определяет расстояние до объектов с использованием ультразвука частотой 40 кГц. Таким же способом это делают летучие мыши и дельфины. Он излучает звук на частоте 40 кГц и слушает отраженное эхо. По времени движения звуковой волны туда и обратно рассчитывается расстояние до предмета.
На показания ультразвукового дальномера не влияет засветка от солнца и цвет предмета. Он позволяет обнаружить даже прозрачную поверхность предмета. Испытывает сложности с измерением расстояний до пушистых предметов.
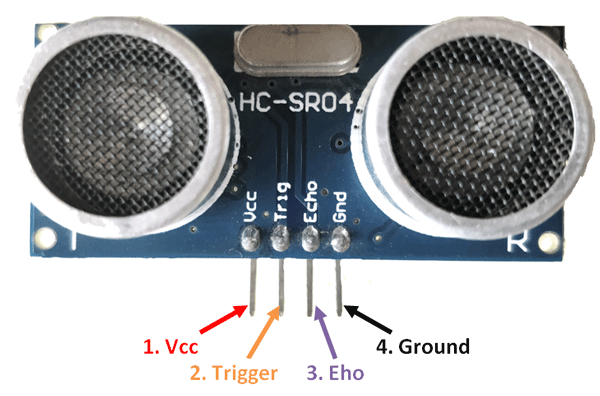
Рисунок 1. Ультразвуковой дальномер HC-SR04
Конфигурация выводов дальномера HC-SR04
Параметры HC-SR04:
- Напряжение питания: 5 В;
- Потребление в режиме тишины: 2 мА;
- Потребление при работе: 15 мА;
- Диапазон измерения расстояний: от 5 до 400 см;
- Угол наблюдения: 30°.
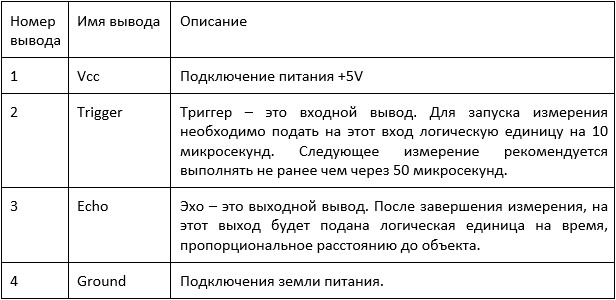
Для работы с ультразвуковым дальномером необходимо установить библиотеку Ultrasonic от разработчика Erick Simões. Откройте меню Инструменты и выберите раздел Управления библиотеками.
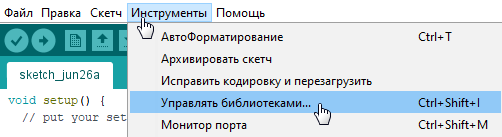
Рисунок 2. Инструменты
Введите в строку поиска слово «ultrasonic».

Рисунок 3. Менеджер библиотек
Прокрутите перечень библиотек и найдите библиотеку Ultrasonic by Erick Simões.

Рисунок 4. Библиотека Ultrasonic by Erick Simões
Нажмите на кнопку Установки.
![]()
Рисунок 5. Кнопка Установки
Теперь можно открыть тестовый скетч в разделе меню Файл – Примеры – Ultrasonic и протестировать работу датчика.
Пример кода программы для Arduino
#include <OrbicraftBus.h>
#include <Ultrasonic.h>
* Module HR-SC04 (four pins)
* ---------------------
* | HC-SC04 | Arduino |
* ---------------------
* | Vcc | 5V |
* | Trig | 6 |
* | Echo | 7 |
* | Gnd | GND |
* ---------------------
Message msg;
OrbicraftBus bus;
Ultrasonic ultrasonic(6, 7); // подключаем HC-SR04 к пинам 6 (Trig) и 7 (Echo)
int distance;
int16_t msgSize = 0;
void setup() {
Serial1.begin(9600); // задаем скорость обмена информацией по Serial1 !!!
}
void loop() {
distance = ultrasonic.read(); // считываем расстояние
msgSize = bus.takeMessage(msg); // пробуем прочитать сообщение с помощью метода takeMessage
if (msgSize > 0){ //если сообщение есть
switch (msg.id){//в зависимости от идентификатора сообщения выполняем те или иные действия
// Рассмотрим случай с идентификатором 2
case 0x02:{
String data = String(distance); // записываем показания датчика расстояния в переменную data
bus.sendMessage(bus.obcAddress, 0, data); // передаем содержимое переменной data на БКУ
break;
}
}
}
}
// Следующий блок кода необходимо всегда добавлять в конец программы
// Функция вызывается автоматически и необходима для обработки сообщения
void serialEvent2() {
bus.serialEventProcess();
}
Пример кода программы для Орбикрафт
#include "libschsat.h"
const float kd = 200.0;
// Временной шаг работы алгоритма, с
const float time_step = 0.1;
// Целевая угловая скорость спутника, град/с.
// Для режима стабилизации равна 0.0.
const float omega_goal = 5.0;
// Номер маховика
const int mtr_num = 1;
// Максимально допустимая скорость маховика, об/мин
const int mtr_max_speed = 3000;
// Номер ДУС (датчика угловой скорости)
const uint16_t hyr_num = 1;
int16_t mtr_new_speed;
int motor_new_speed_PD(int mtr_speed, int omega, float omega_goal){
/* Функция для определения новой скорости маховика.
Новая скорость маховика складывается из
текущей скорости маховика и приращения скорости.
Приращение скорости пропорционально ошибке по углу и ошибке по угловой скорости.
mtr_speed - текущая угловая скорость маховика, об/мин
omega - текущая угловая скорость спутника, град/с
omega_goal - целевая угловая скорость спутника, град/с
mtr_new_speed - требуемая угловая скорость маховика, об/мин*/
mtr_new_speed = (int)(mtr_speed + kd * (omega - omega_goal));
if (mtr_new_speed > mtr_max_speed)
{
mtr_new_speed = mtr_max_speed;
}
else if (mtr_new_speed < -mtr_max_speed)
{
mtr_new_speed = -mtr_max_speed;
}
return mtr_new_speed;
}
void initialize_all(void){
/*Функция включает все приборы,которые будут использоваться в основной программе.*/
printf("Enable motor №%d\n", mtr_num);
motor_turn_on(mtr_num);
Sleep(1);
printf("Enable angular velocity sensor №%d\n", hyr_num);
hyro_turn_on(hyr_num);
Sleep(1);
}
void switch_off_all(void){
/* Функция отключает все приборы,которые будут использоваться в основной программе.*/
printf("Finishing...");
int16_t new_speed = mtr_new_speed; //
printf("\nDisable angular velocity sensor №%d\n", hyr_num);
hyro_turn_off(hyr_num);
motor_set_speed(mtr_num, 0, &new_speed);
Sleep (1);
motor_turn_off(mtr_num);
printf("Finish program\n");
}
void control(void){
char answer[255]; // Создаем массив для сохранения ответа
//nt32_t count = 100; // Устанавливаем счетчик на 5 шагов
initialize_all();
// Инициализируем статус маховика
int16_t mtr_state;
// Инициализируем статус ДУС
int16_t hyro_state = 0;
int16_t pRAW_dataX = 0;
int16_t pRAW_dataY = 0;
int16_t pRAW_dataZ = 0;
int16_t *gx_raw = &pRAW_dataX;
int16_t *gy_raw = &pRAW_dataY;
int16_t *gz_raw = &pRAW_dataZ;
int16_t speed = 0;
int16_t *mtr_speed = &speed;
int16_t omega;
int i;
for(i = 0; i < 500; i++){
int status = arduino_send(0, 2, NULL, answer, 100);
if (status == 0){
printf("%s\r\n", answer);
}
else{
printf("ErrorSend\r\n");
}
//printf("i = %d\n", i);
// Опрос датчика угловой скорости и маховика.
hyro_state = hyro_request_raw(hyr_num, gx_raw, gy_raw, gz_raw);
mtr_state = motor_request_speed(mtr_num, mtr_speed);
// Обработка показаний датчика угловой скорости,
// вычисление угловой скорости спутника по показаниям ДУС.
// Если код ошибки ДУС равен 0, т.е. ошибки нет
if (!hyro_state){
float gz_degs = *gz_raw * 0.00875;
omega = gz_degs;
}
else if (hyro_state == 1){
printf("Fail because of access error, check the connection\n");
}
else if (hyro_state == 2){
printf("Fail because of interface error, check your code\n");
}
int mtr_new_speed;
//Обработка показаний маховика и установка требуемой угловой скорости.
if (!mtr_state) {
// если код ошибки 0, т.е. ошибки нет
int16_t mtr_speed=0;
motor_request_speed(mtr_num, &mtr_speed);
//printf("Motor_speed: %d\n", mtr_speed);
// установка новой скорости маховика
mtr_new_speed = motor_new_speed_PD(mtr_speed,omega,omega_goal);
motor_set_speed(mtr_num, mtr_new_speed, &omega);
}
}
Sleep(time_step);
switch_off_all();
}
Анализ полученных данных
Результатом работы программы будет большой массив данных, выведенных Орбикрафтом на экран. Для обработки этих данных следует использовать Excel. Скопируйте данные, и вставьте их в один столбец Excel. Постройте график высот на основе полученных данных.

Рисунок 6. График высот на основе полученных данных