08 Урок. Знакомство с солнечными датчиками
Знакомство с датчиком освещенности смартфона
Установите в смартфон приложение Andro sensor или аналогичное приложение с выводом на экран информации со встроенных датчиков смартфона. Запустите приложение и найдите датчик освещенности под названием LIGHT.
Рисунок 1. Приложение Andro sensor
Освещенность изменяется в люксах (lux), один люкс – это равен освещённости поверхности площадью 1 м² при световом потоке падающего на неё излучения, равном 1 люмен. Соответственно, выполнятся: 1 лк = 1 лм/м2.
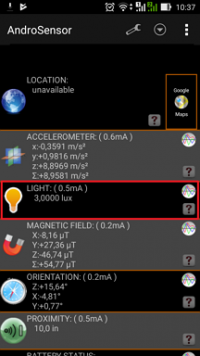
Рисунок 2. Освещенность
Один люмен равен световому потоку, испускаемому точечным источником, c силой света, равной одной канделе, в телесный угол величиной в один стерадиан.
Рисунок 3. Люмен
Полный световой поток, создаваемый точечным источником, с силой света одна кандела, равен 4π люменам. Кандела – это сила света, энергетическая сила которого составляет 1/683 Вт/стерадиан. Сила света, излучаемого парафиновой свечой, близка к одной канделе.

Рисунок 4. Парафиновая свеча
Требования к освещению на рабочих местах, оборудованных ПЭВМ согласно СанПиН 2.2.2/2.4.1340-03: Освещенность на рабочем столе: 300-500 лк. Освещенность на экране ПЭВМ: не выше 300лк.
Проверка работоспособности солнечных датчиков
Соедините БКУ с СЭП и четырьмя солнечными датчиками. Загрузите в БКУ следующую программу, которая выведет значения, считанные с солнечных датчиков.
Код на Python:
def control(): # Основная функция программы, в которой нужно вызывать остальные функции
sun_result = [0,0,0] # Инициализируем sun_result
num = 1
print "Enable sun sensor №", num
sun_sensor_turn_on(num)
sleep(1)
print "Get RAW data from sun sensor"
for i in range(10):
sun_result = sun_sensor_request_raw(num)
if not sun_result[0]: # если датчик вернул сообщение об ошибке,
print "state:", sun_result[0], "raw =", sun_result[1], \
sun_result[2]
elif sun_result[0] == 1:
print "Fail because of access error, check the connection"
elif sun_result[0] == 2:
print "Fail because of interface error, check your code"
sleep(1)
print "Disable sun sensor №", num
sun_sensor_turn_off(num)
Код на С:
#include <stdio.h>
#include <stdint.h>
#include "libschsat.h"
#define LSS_OK 0
#define LSS_ERROR 1
#define LSS_BREAK 2
int control(){ //Основная функция программы
uint16_t sun_result[] = {0, 0, 0}; // инициализируем sun_result
uint16_t num = 1; // номер солнечного датчика
printf("Enable sun sensor №%d\n", num);
sun_sensor_turn_on(num); //включаем датчик
Sleep(1); //Ждем включения 1 секунду
printf("Get RAW data from sun sensor №%d\n", num);
int i;
for (i = 0; i < 10; i++) //считываем показаия 10 раз
{
sun_result[0] = sun_sensor_request_raw(num,& sun_result[1],& sun_result[2]);/*проверить как работает, очень странно, что работает
если не работает задать sun_result[0] */
if (!sun_result[0]){ //если датчик не вернул сообщение об ошибке,
printf("state: %d raw = %d, %d\n", i, sun_result[1], sun_result[2]);
}
else if (sun_result[0] == 1) { //если датчик вернул сообщение об ошибке 1
printf("Fail because of access error, check the connection\n");
}
else if (sun_result[0] == 2) { //если датчик вернул сообщение об ошибке 2
printf("Fail because of interface error, check you code\n");
}
Sleep(1); //показания считываются раз в секунду
}
printf("Disable sun sensor №%d\n", num);
sun_sensor_turn_off(num); //выключаем солнечный датчик
return 0;
}
Запустите программу, при комнатном освещении значения датчиков будут находится в диапазоне от 70 до 300. Направьте на датчики свет от имитатора солнца – теперь значения будут изменяться от 70 до 20000.
Сбор значений для калибровки солнечных датчиков
Установите на верхнюю панель Орбикрафт ДУС и магнитометр, и 4 солнечных датчика на 4 стороны Орбикрафта. Солнечные датчики установите перевернутыми, чтобы шлейфы не закрывали окно датчика.
Рисунок 5. Орбикрафт c ДУС и магнитометром на верхней панели
Загрузите в БКУ следующую программу.
Код на Python:
import time
import math
#!/usr/bin/env python
# -*- coding: utf-8 -*-
# Коэффициент дифференциальной обратной связи.
# Коэффициент подбирается экспериментально в зависимости от формы
# и массы вашего спутника.
kd = 200.0
# Временной шаг работы алгоритма, с
time_step = 0.05
# Целевая угловая скорость спутника, град/с.
# Для режима стабилизации равна 0.0.
omega_goal = 0.0
# Максимально допустимая скорость маховика, об/мин
mtr_max_speed = 5000
# Номер маховика
mtr_num = 1
# Номер ДУС (датчика угловой скорости)
hyr_num = 1
# Номер магнитометра
mag_num = 1
# Номер результата измерений
i = 1
# Угол поворота текущий
alpha = 0.0
# Функция включает все приборы,
# которые будут использоваться в основной программе.
def initialize_all():
print "Enable angular velocity sensor №", hyr_num
hyro_turn_on(hyr_num)
sleep(1)
print "Enable magnetometer", mag_num
magnetometer_turn_on(mag_num)
sleep(1) # Ждем включения 1 секунду
print "Enable Sun sensors 1-4"
sun_sensor_turn_on(1)
sun_sensor_turn_on(2)
sun_sensor_turn_on(3)
sun_sensor_turn_on(4)
sleep(1)
print "Enable motor №", mtr_num
motor_turn_on(mtr_num)
sleep(1)
# Функция отключает все приборы,
# которые будут использоваться в основной программе.
def switch_off_all():
print "Finishing..."
hyro_turn_off(hyr_num)
magnetometer_turn_off(mag_num)
sun_sensor_turn_off(1)
sun_sensor_turn_off(2)
sun_sensor_turn_off(3)
sun_sensor_turn_off(4)
motor_set_speed(mtr_num, 0)
sleep(1)
motor_turn_off(mtr_num)
print "Finish program"
def mag_calibrated(magx,magy,magz):
# вместо этих 3-х строк кода с коэффициентами калибровки, должны быть строки с коэффициентами калибровки для Вашего магнитометра
#magx_cal = 1.04*magx - 0.26*magy + 0.05*magz - 68.76 # это 1-я строчка, которую нужно заменить по результатам калибровки Вашего магнитометра
#magy_cal = 0.24*magx + 1.04*magy + 0.29*magz + 256.92 # это 2-я строчка, которую нужно заменить по результатам калибровки Вашего магнитометра
#magz_cal = -0.09*magx - 0.19*magy + 0.77*magz + 159.41 # это 3-я строчка, которую нужно заменить по результатам калибровки Вашего магнитометра
magx_cal = 1.06*(magx + -7.49) + -0.01*(magy + -23.59) + 0.07*(magz + -108.24)
magy_cal = -0.01*(magx + -7.49) + 1.11*(magy + -23.59) + 0.09*(magz + -108.24)
magz_cal = 0.07*(magx + -7.49) + 0.09*(magy + -23.59) + 1.00*(magz + -108.24)
return magx_cal, magy_cal, magz_cal
# Функции для определение новой скорости маховика.
# Новая скорость маховика складывается из
# текущей скорости маховика и приращения скорости.
# Приращение скорости пропорционально ошибке по углу
# и ошибке по угловой скорости.
# mtr_speed - текущая угловая скорость маховика, об/мин
# omega - текущая угловая скорость спутника, град/с
# omega_goal - целевая угловая скорость спутника, град/с
# mtr_new_speed - требуемая угловая скорость маховика, об/мин
def motor_new_speed_PD(mtr_speed, omega, omega_goal):
mtr_new_speed = int(mtr_speed
+ kd*(omega-omega_goal)
)
if mtr_new_speed > mtr_max_speed:
mtr_new_speed = mtr_max_speed
elif mtr_new_speed < -mtr_max_speed:
mtr_new_speed = -mtr_max_speed
return mtr_new_speed
# Основная функция программы, в которой вызываются остальные функции.
def control():
omega_goal = 0 # omega_goal - целевая угловая скорость спутника, град/с
initialize_all()
# Инициализируем статус маховика
mtr_state = 0
# Инициализируем статус ДУС
hyro_state = 0
sun_sensor_num = 0 # Инициализируем переменную для номера солнечного датчика
sun_result_1 = [0,0,0] # Инициализируем sun_result_1
sun_result_2 = [0,0,0] # Инициализируем sun_result_2
sun_result_3 = [0,0,0] # Инициализируем sun_result_3
sun_result_4 = [0,0,0] # Инициализируем sun_result_4
mag_alpha = 0
output_data_all = [0, 0, 0, 0, 0, 0, 0, 0, 0]
output_data = [0, 0, 0, 0, 0, 0, 0, 0, 0]
# Номер результата измерений
i = 0
# Запоминаем время начала вращения
time_start = time.time()
# Запоминаем время начала секундного интервала
time_interval = time.time()
# Интервал вывода данных с солнечных датчиков в секундах
time_output = 0.1
while True:
# Опрос датчика угловой скорости и маховика.
hyro_state, gx_raw, gy_raw, gz_raw = hyro_request_raw(hyr_num)
mtr_state, mtr_speed = motor_request_speed(mtr_num)
mag_state, magx_raw, magy_raw, magz_raw = magnetometer_request_raw(mag_num)
# Обработка показаний датчика угловой скорости,
# вычисление угловой скорости спутника по показаниям ДУС.
# Если код ошибки ДУС равен 0, т.е. ошибки нет
if not hyro_state:
gx_degs = gx_raw * 0.00875
gy_degs = gy_raw * 0.00875
gz_degs = gz_raw * 0.00875
# если ДУС установлен осью z вверх, то угловая скорость
# спутника совпадает с показаниями ДУС по оси z, иначе
# необходимо изменить знак: omega = - gz_degs
omega = gz_degs
elif hyro_state == 1:
print "Fail because of access error, check the connection"
elif hyro_state == 2:
print "Fail because of interface error, check your code"
#Обработка показаний маховика и установка трубемой угловой скорости.
if not mtr_state: # если код ошибки 0, т.е. ошибки нет
# установка новой скорости маховика
mtr_new_speed = motor_new_speed_PD(mtr_speed,omega,omega_goal)
motor_set_speed(mtr_num, mtr_new_speed)
time.sleep(time_step)
time_current = time.time() - time_start
if not mag_state: # если магнитометр вернул код ошибки 0, т.е. ошибки нет
magx_cal, magy_cal, magz_cal = mag_calibrated(magx_raw,magy_raw,magz_raw)
magy_cal = - magy_cal # переходим из левой системы координат, которая изображена на магнитометре в правую, для того чтобы положительное направление угла было против часовой стрелки
mag_alpha = math.atan2(magy_cal, magx_cal)/math.pi*180
if (time.time() - time_interval) > time_output:
# Запоминаем время начала следующего секундного интервала
time_interval = time.time()
sun_result_1 = sun_sensor_request_raw(1)
sun_result_2 = sun_sensor_request_raw(2)
sun_result_3 = sun_sensor_request_raw(3)
sun_result_4 = sun_sensor_request_raw(4)
#print sun_result_1, sun_result_2, sun_result_3, sun_result_4, mag_alpha, time_current
output_data = [time_current, sun_result_1[1], sun_result_1[2], sun_result_2[1], sun_result_2[2], sun_result_3[1], sun_result_3[2], sun_result_4[1], sun_result_4[2], mag_alpha]
output_data_all += output_data
if i > 100: # Начинаем вращение через 5с после запуска
omega_goal = 6.0 # omega_goal - целевая угловая скорость спутника, град/с
if time_current > 90:
break
i += 1
switch_off_all()
print "time_end = " , time.time() - time_start
for i in range(0, 5000, 10):
print output_data_all[i-1], output_data_all[i], output_data_all[i+1], output_data_all[i+2], output_data_all[i+3], output_data_all[i+4], output_data_all[i+5], output_data_all[i+6], output_data_all[i+7], output_data_all[i+8]
Код на С:
#include <stdio.h>
#include <stdint.h>
#include "libschsat.h"
#define LSS_OK 0
#define LSS_ERROR 1
#define LSS_BREAK 2
#include <math.h>
#include <time.h>
/*Коэффициент дифференциальной обратной связи.
Коэффициент положительный, если маховик расположен осью z вверх
и ДУС расположен осью z также вверх.
Коэффициент подбирается экспериментально в зависимости от формы
и массы вашего спутника.*/
const float kd = 200.0;
// Временной шаг работы алгоритма, с
const float time_step = 0.1;
/* Целевая угловая скорость спутника, град/с. Для режима стабилизации равна 0.0.*/
const float omega_goal = 0.0;
// Максимально допустимая скорость маховика, об/мин
const int mtr_max_speed = 5000;
const uint16_t mtr_num = 1; // Номер маховика
const uint16_t hyr_num = 1; // Номер ДУС
const uint16_t mag_num = 1; // Номер магнитометра
// Номер результата измерений
int i = 1;
// Угол поворота текущий
const float alpha = 0.0;
void initialize_all(void){/* Функция включает все приборы,
которые будут использоваться в основной программе.*/
printf("Enable angular velocity sensor №%d\n", hyr_num);
hyro_turn_on(hyr_num);
Sleep(1);
printf("Enable magnetometer %d\n", mag_num);
magnetometer_turn_on(mag_num);
Sleep(1); // Ждем включения 1 секунду
printf("Enable Sun sensors 1-4\n");
sun_sensor_turn_on(1);
sun_sensor_turn_on(2);
sun_sensor_turn_on(3);
sun_sensor_turn_on(4);
Sleep(1);
printf("Enable motor №%d\n", mtr_num);
motor_turn_on(mtr_num);
Sleep(1);
}
void switch_off_all(void){/* Функция отключает все приборы,
которые будут использоваться в основной программе.*/
printf("Finishing...");
int16_t new_speed = 0;
hyro_turn_off(hyr_num);
magnetometer_turn_off(mag_num);
sun_sensor_turn_off(1);
sun_sensor_turn_off(2);
sun_sensor_turn_off(3);
sun_sensor_turn_off(4);
motor_set_speed(mtr_num, 0, &new_speed);
Sleep(1);
motor_turn_off(mtr_num);
printf("\nFinish program\n");
}
int mag_calibrated(int16_t *magx, int16_t *magy, int16_t *magz ){
/*Функция mag_calibrated вносит поправки
в показания магнитометра с учетом калибровочных коэффициентов
вместо этих 3-х строк кода с коэффициентами калибровки, должны быть строки с коэффициентами калибровки для Вашего магнитометра
//magx_cal = 1.04*magx - 0.26*magy + 0.05*magz - 68.76 # это 1-я строчка, которую нужно заменить по результатам калибровки Вашего магнитометра
//magy_cal = 0.24*magx + 1.04*magy + 0.29*magz + 256.92 # это 2-я строчка, которую нужно заменить по результатам калибровки Вашего магнитометра
//magz_cal = -0.09*magx - 0.19*magy + 0.77*magz + 159.41 # это 3-я строчка, которую нужно заменить по результатам калибровки Вашего магнитометра*/
float magx_cal;
float magy_cal;
float magz_cal;
magx_cal = 1.06*(*magx + -7.49) + -0.01*(*magy + -23.59) + 0.07*(*magz + -108.24);
magy_cal = -0.01*(*magx + -7.49) + 1.11*(*magy + -23.59) + 0.09*(*magz + -108.24);
magz_cal = 0.07*(*magx + -7.49) + 0.09*(*magy + -23.59) + 1.00*(*magz + -108.24);
*magx = magx_cal;
*magy = magy_cal;
*magz = magz_cal;
return 0;
}
int motor_new_speed_PD(int mtr_speed, float omega, int16_t omega_goal){
/* Функция для определения новой скорости маховика.
Новая скорость маховика складывается из
текущей скорости маховика и приращения скорости.
Приращение скорости пропорционально ошибке по углу и ошибке по угловой скорости.
mtr_speed - текущая угловая скорость маховика, об/мин
omega - текущая угловая скорость спутника, град/с
omega_goal - целевая угловая скорость спутника, град/с
mtr_new_speed - требуемая угловая скорость маховика, об/мин*/
int16_t mtr_new_speed;
mtr_new_speed = (int)(mtr_speed + kd * (omega - omega_goal));
if (mtr_new_speed > mtr_max_speed)
{
mtr_new_speed = mtr_max_speed;
}
else if (mtr_new_speed < -mtr_max_speed)
{
mtr_new_speed = -mtr_max_speed;
}
return mtr_new_speed;
}
int control(){// Основная функция программы, в которой вызываются остальные функции.
int16_t omega;
int omega_goal = 0; // omega_goal - целевая угловая скорость спутника, град/с
initialize_all();
int mtr_state = 0; // Инициализируем статус маховика
int hyro_state = 0; // Инициализируем статус ДУС
int mag_state = 0; // Инициализируем статус магнитометра
int16_t mtr_speed;
int16_t mtr_new_speed;
//данные ДУС
int16_t gx_raw;
int16_t gy_raw;
int16_t gz_raw;
int16_t *hyrox_raw=&gx_raw;
int16_t *hyroy_raw= &gy_raw;
int16_t *hyroz_raw = &gz_raw;
//данные магнитометра
int16_t mgx_cal=0;
int16_t mgy_cal=0;
int16_t mgz_cal=0;
int16_t *magx_raw = &mgx_cal;
int16_t *magy_raw = &mgy_cal;
int16_t *magz_raw = &mgz_cal;
float gx_degs;
float gy_degs;
float gz_degs;
uint16_t sun_result_1[] = {0,0,0}; // Инициализируем sun_result_1
uint16_t sun_result_2[] = {0,0,0}; // Инициализируем sun_result_2
uint16_t sun_result_3[] = {0,0,0}; // Инициализируем sun_result_3
uint16_t sun_result_4[] = {0,0,0}; // Инициализируем sun_result_4
int mag_alpha = 0;
const int sizeOD = 10;
int sizeODA = 0;
int tempSODA;
// double* output_data = (double*)calloc(sizeOD, sizeof(double));
double* output_data_all = (double*)calloc(sizeODA, sizeof(double));
// Номер результата измерений
int i = 0;
// Запоминаем время начала вращения
long int time_start = time(NULL);
// Запоминаем время начала секундного интервала
long int time_interval = time(NULL);
// Интервал вывода данных с солнечных датчиков в секундах
int time_output = 0.1;
int j;
char a=1;
while (a==1){
// Опрос датчика угловой скорости и маховика.
hyro_state = hyro_request_raw(hyr_num,hyrox_raw,hyroy_raw,hyroz_raw);
mtr_state = motor_request_speed(mtr_num, &mtr_speed);
mag_state = magnetometer_request_raw(mag_num, magx_raw, magy_raw, magz_raw);
if (!hyro_state){
/*Обработка показаний датчика угловой скорости,
вычисление угловой скорости спутника по показаниям ДУС.
Если код ошибки ДУС равен 0, т.е. ошибки нет*/
gx_degs = gx_raw * 0.00875;
gy_degs = gy_raw * 0.00875;
gz_degs = gz_raw * 0.00875;
/* если ДУС установлен осью z вверх, то угловая скорость
спутника совпадает с показаниями ДУС по оси z, иначе
необходимо изменить знак: omega = - gz_degs*/
omega = gz_degs;
// printf("gx_degs=%f, gy_degs=%f, gz_degs=%f\n", gx_degs, gy_degs, gz_degs);//ну так на всякий
}
else if (hyro_state == 1){
printf("Fail because of access error, check the connection\n");
}
else if (hyro_state == 2) {
printf("Fail because of interface error, check your code\n");
}
//Обработка показаний маховика и установка требуемой угловой скорости.
if (!mtr_state) {// если код ошибки 0, т.е. ошибки нет
int16_t mtr_speed=0;
motor_request_speed(mtr_num, &mtr_speed);
// printf("Motor_speed: %d\n", mtr_speed);
// установка новой скорости маховика
mtr_new_speed = motor_new_speed_PD(mtr_speed,omega,omega_goal);
motor_set_speed(mtr_num, mtr_new_speed, &omega);
}
Sleep(time_step);
long int time_current = time(NULL) - time_start;
if (!mag_state){
mag_calibrated(magx_raw,magy_raw,magz_raw);
*magy_raw = - *magy_raw; /*переходим из левой системы координат,
которая изображена на магнитометре в правую, для того чтобы
положительное направление угла было против часовой стрелки*/
mag_alpha = atan2(mgy_cal, mgx_cal)/M_PI*180;
}
if ((time(NULL) - time_interval) > time_output){
// Запоминаем время начала следующего секундного интервала
time_interval = time(NULL);
sun_result_1[0] = sun_sensor_request_raw(1, &sun_result_1[1],&sun_result_1[2]);
sun_result_2[0] = sun_sensor_request_raw(2,&sun_result_2[1],&sun_result_2[2]);
sun_result_3[0] = sun_sensor_request_raw(3,&sun_result_3[1],&sun_result_3[2]);
sun_result_4[0] = sun_sensor_request_raw(4,&sun_result_4[1],&sun_result_4[2]);
int output_data[] = {time_current, sun_result_1[1], sun_result_1[2], sun_result_2[1], sun_result_2[2], sun_result_3[1], sun_result_3[2], sun_result_4[1], sun_result_4[2], mag_alpha};
tempSODA = sizeODA;
sizeODA += sizeOD;
output_data_all = (double*)realloc(output_data_all, sizeODA*sizeof(double));
for (j=tempSODA; j<sizeODA; j++) {
output_data_all[j] = output_data[j-sizeODA+1];
}
}
if (i > 100){ // Начинаем вращение через 5с после запуска
omega_goal = 6.0; // omega_goal - целевая угловая скорость спутника, град/с
}
if (time_current > 90){
break;
}
i += 1;
}
switch_off_all();
printf("time_end = %ld" , time(NULL) - time_start);
for (i = 0; i < 5000; i = i + 10){
printf("%f, %f, %f, %f, %f, %f, %f, %f, %f, %f\n",output_data_all[i], output_data_all[i+1], output_data_all[i+2], output_data_all[i+3], output_data_all[i+4], output_data_all[i+5], output_data_all[i+6], output_data_all[i+7], output_data_all[i+8], output_data_all[i+9]);
}
printf ("Ok\n");
return 0;
}
По результатам работы программы будут выведены 500 строк с данными следующего вида:
onmessage0.132400989532 74 117 27 25 156 214 156 61 -34.6566118491
onmessage0.281419992447 74 116 27 25 156 215 156 61 -34.555539497
onmessage0.438189029694 74 116 27 25 156 214 156 61 -33.6820711721
onmessage0.585952043533 74 116 27 25 156 215 156 61 -34.6566118491
onmessage0.733724832535 74 116 27 25 156 214 156 61 -33.6705914701
onmessage0.88149189949 74 117 27 25 156 214 156 61 -33.7733709383
onmessage1.02926301956 74 117 27 25 156 214 156 61 -33.6745869595
onmessage1.1782848835 74 117 27 25 156 214 156 61 -33.4062495287
onmessage1.32730197906 74 117 27 25 156 214 156 61 -33.2488503276
onmessage1.47507381439 74 117 27 25 156 214 156 61 -33.8923918648
Где первое значение - время с начала измерений, два следующих – данные с первого солнечного датчика, следующие два значения со второго солнечного датчика, следующие два с третьего и с четвертого. Десятое значение – показания магнетометра (угол поворота Орбикрафт относительно направления на магнитный полюс). Для анализа полученных данных следует скопировать их из браузера (выбрав с помощью Ctrl-A и скопировав с помощью Ctrl-С) и сохранить в новом текстовом документе в Notepad++ (вставка с помощью (Ctrl-V)). Затем следует очистить их от служебной информации в начале и в конце файла. Часто встречающееся служебное слово onmessage следует удалить с помощью функции замены Notepad++. Нажмите на клавиатуре Ctrl-H, введите в поле «Найти» onmessage, поле «Заменить на» оставьте пустым и нажмите на «Заменить все» или «Заменить во всех открытых документах».
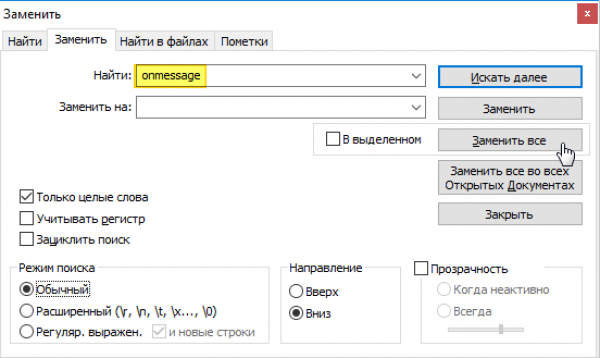
Рисунок 6. Создание очищенного документа
Сохраните очищенный документ в txt файле. Теперь его можно проанализировать в Excel.