Настройка Houston App
Настройка периода получения телеметрии
Необходимо настроить период получения телеметрии со всех устройств 100 миллисекунд. Используйте команду -A63 cfg_regular_telemetry которая есть у всех устройств (рисунок 1):
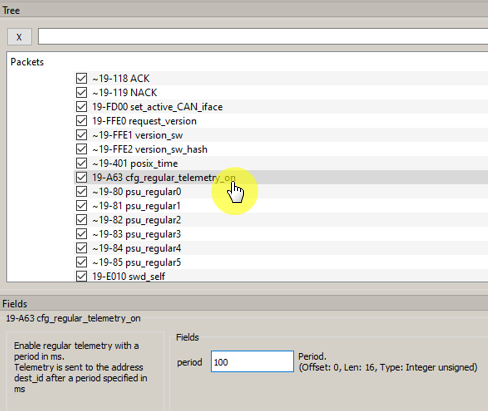
Рисунок 1. Команда настройки получения телеметрии
При необходимости включите телеметрию солнечных датчиков командой -23 tc_enable_telemetry (рисунок 2):
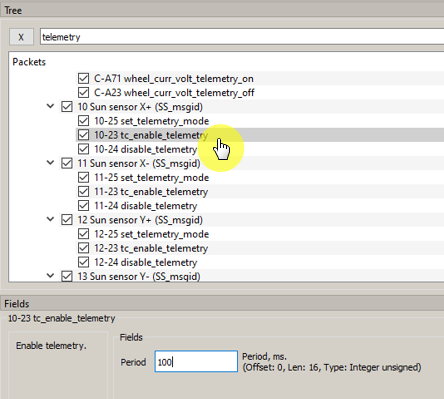
Рисунок 2. Период телеметрии солнечных датчиков
Сохраните настройки солнечных датчиков с помощью команды 10-A60 cfg_save_params, в ответ на эту команду придет ответ ~ACK.
Установка смещения ноля ДУС
Установите смещение ноля ДУС с помощью команды 9-BD1 set_ratesens_offset. Установите ОрбиКрафт 3D на арретир, чтобы он был неподвижен и запомните величины отклонения от ноля показаний ДУС. В окошки поля Fields введите эти значения ДУС для их компенсации (рисунок 3):
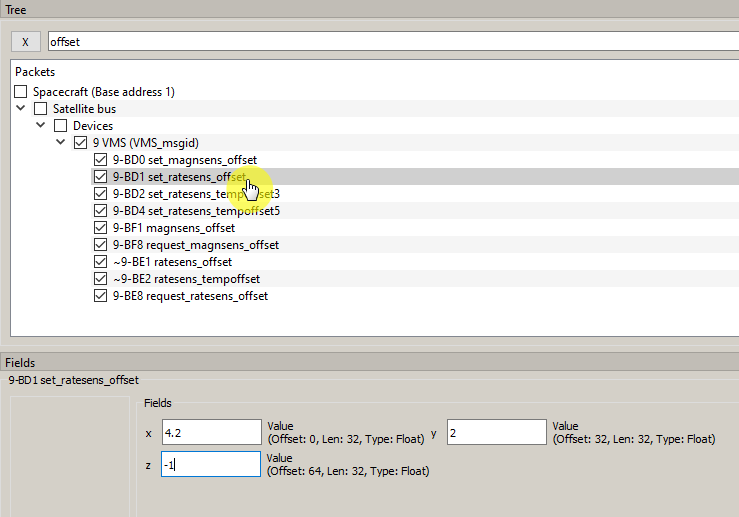
Рисунок 3. Установка смещения нуля
Величина смещения ноля должны быть не более 0.2.
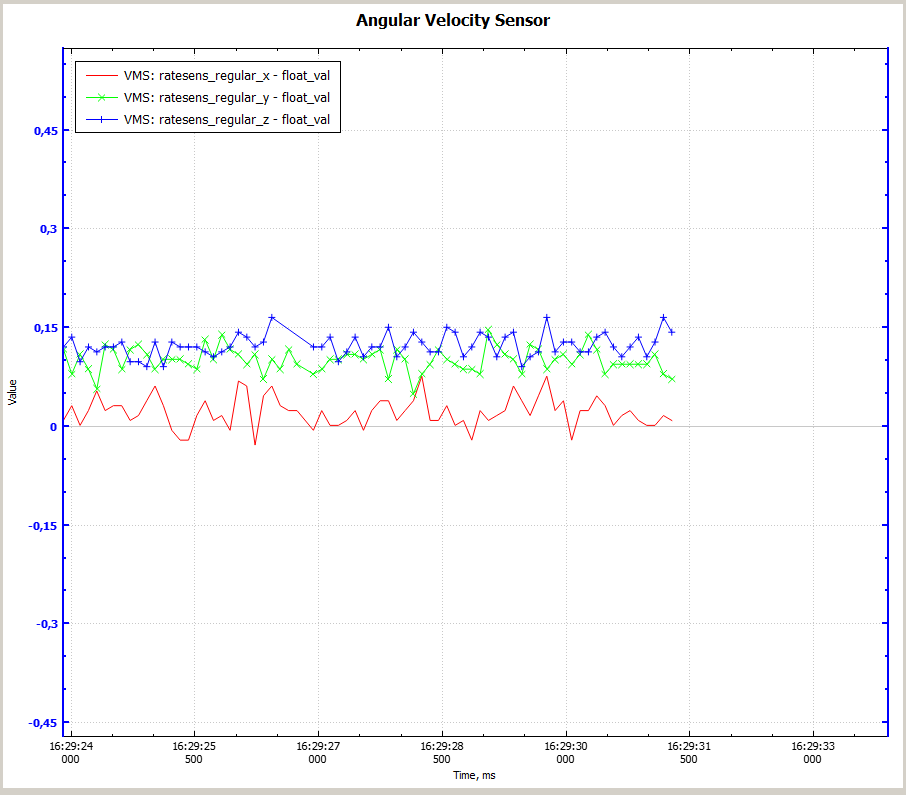
Рисунок 4. График значений ДУС
Сохраните настройки ДУС с помощью команды 19-A60 cfg_save_params, в ответ на эту команду придет ответ ~ACK.
Установка смещения ноля магнитометра
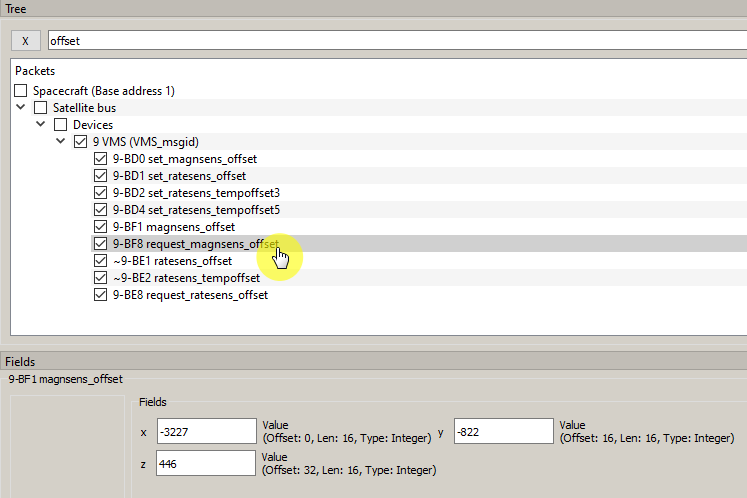
Рисунок 5. Установка смещения ноля магнитометра
Настройка матрицы ортонормирования
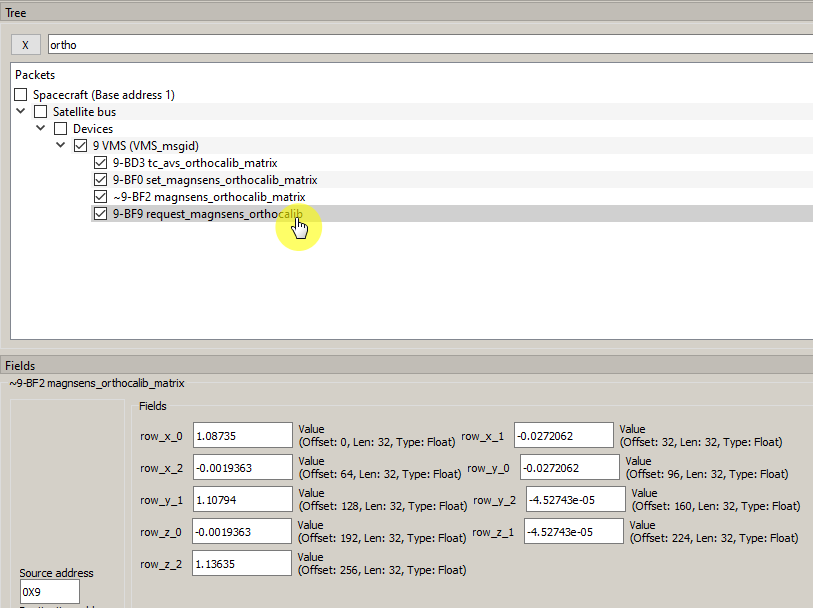
Рисунок 6. Матрица ортонормирования
Запрос расширенной телеметрии
Запросим расширенную телеметрию командой 5-А41 request_extended_telemetry (рисунок 7):
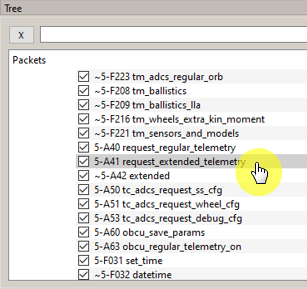
Рисунок 7. Запрос расширенной телеметрии
В ответ на запрос придет 12 ответов (рисунок 8):
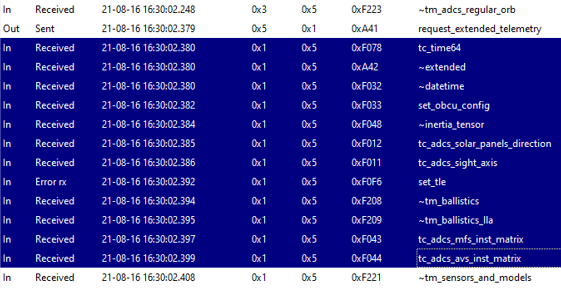
Рисунок 8. Ответы по запрошенной телеметрии
Выберите в окне History команду 5-F033 set_obcu_config. Все параметры должны быть такими же как на рисунке 9.
Важные поля K_alpha=3, K_w=5, angular_rate_multiplikator=5, wheel_num=3, wheel_control_limit=0.01, wheel_rotor_inertia=8.4e-05 (рисунок 9):
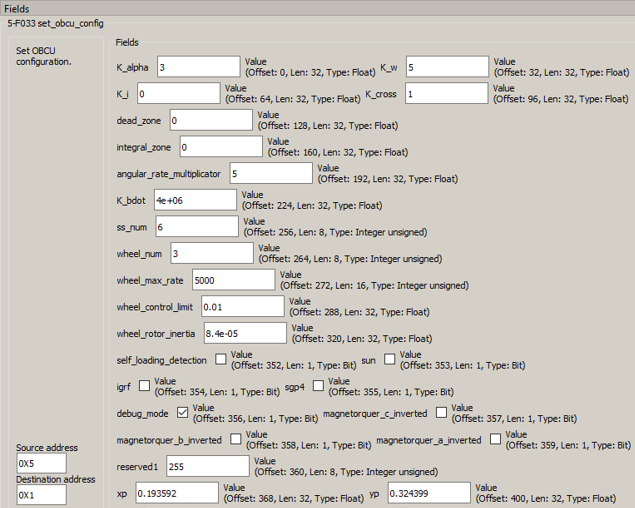
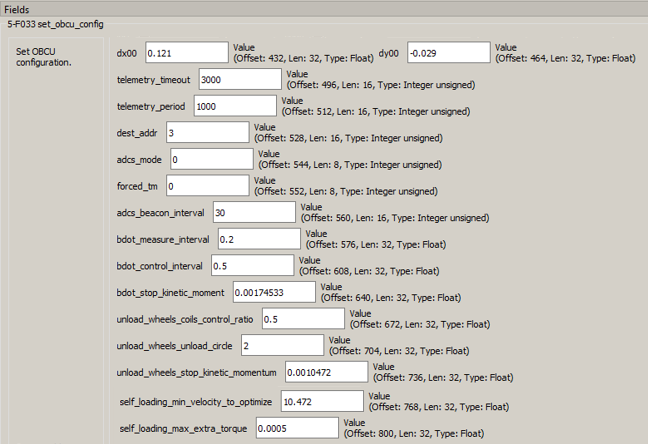
Рисунок 9. Параметры выбранной команды
При необходимости скорректируйте параметру и нажмите на кнопку To server для сохранения параметров.
Проверка солнечных датчиков
Запрашиваем конфигурацию солнечных датчиков командой 5-A50 tc_adcs_request_ss_cfg (рисунок 10):
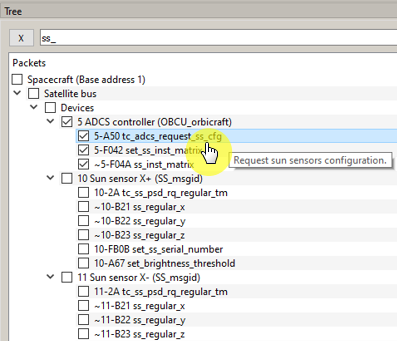
Рисунок 10.Запрос конфигурации СД
В ответ получим сообщение ~5-F04A ss_inst_matrix (рисунок 11):
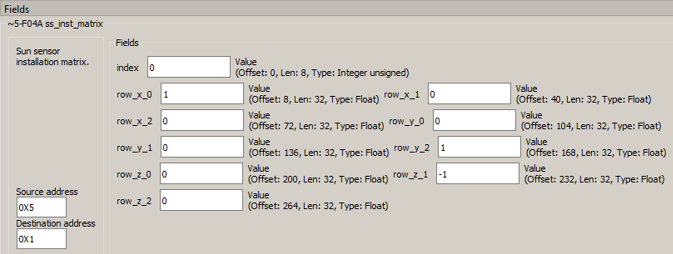
Рисунок 11. Полученное сообщение
Проверка маховиков
Запрашиваем конфигурацию маховиков 5-A51 tc_adcs_request_wheel_cfg (рисунок 12):
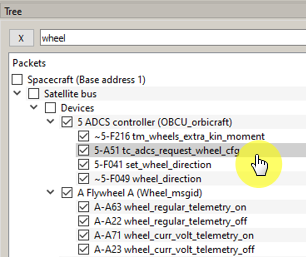
Рисунок 12. Запрос конфигурации маховиков
Получим три ответа 5-F049 wheel_direction. С индексом 0 - маховик А, с индексом 1 - маховик В, с индексом 2 - маховик С (рисунок 13):
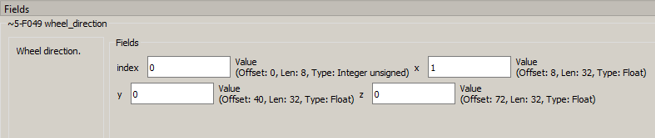

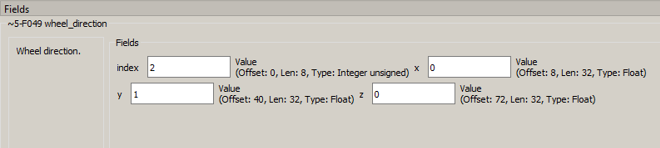
Рисунок 13. Полученные ответы
Включаем маховики по одному. Установим скорость вращения маховика А в 200 об/мин командой А-А01 rpm (рисунок 14):
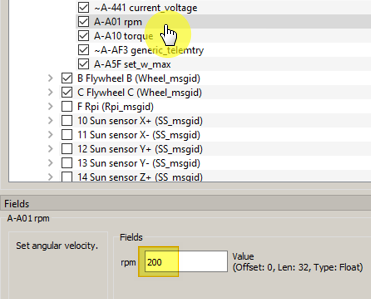
Рисунок 14. Установка скорость вращения маховика
Следует проконтролировать какой маховик начал вращаться и в какую сторону. Должен вращаться маховик А в направлении «правого винта».