04 Урок. Стабилизация спутника
Режим стабилизации спутника означает поддержание нулевой угловой скорости. Такой режим необходим, например, для получения четких снимков или их передачи на наземный пункт приема, когда время передачи данных продолжительно и не допустимо отклонение антенны спутника от направления на наземный пункт приема данных. Также описанная в этом уроке теория подходит для режима поддержания любой требуемой угловой скорости, а не только нулевой, для таких задач как отслеживание подвижного объекта.
Как реализовать режим стабилизации
Изменять угловую скорость спутника можно с помощью маховиков, реактивных двигателей, электромагнитных катушек, двигателей - гиродинов. В этом примере мы рассмотрим управление управляющим моментом с помощью маховика. Действие этого устройства основано на законе сохранения момента импульса. Например, когда двигатель-маховик раскручивается в одну сторону, то космический аппарат (КА), соответственно, начинает вращаться в другую сторону под действием такого же раскручивающего момента, но направленного в противоположную сторону в соответствии с третьим законом Ньютона. Если под влиянием внешних факторов КА начал разворачиваться в определённом направлении, достаточно увеличить скорость вращения маховика в ту же сторону и нежелательный поворот КА прекратится, вместо спутника вращательный момент «вберет» в себя маховик. Получать информацию об угловой скорости спутника будем с помощью датчика угловой скорости. В этом примере мы рассмотрим как по показаниям датчика угловой скорости и данных о частоте вращения маховика рассчитать управляющие команды для маховика, чтобы спутник был стабилизирован или поддерживал требуемую угловую скорость.
Теория
Аналогии между поступательным и вращательным движением
Аналогом закона сохранения импульса для вращательного движения является закон сохранения момента импульса или закон сохранения кинетического момента:
Вообще вращательное движение спутника описывается законами схожими с законами известными для поступательного движения. Так, например, для каждого параметра в поступательном движении есть аналогичный параметр для вращательного движения:
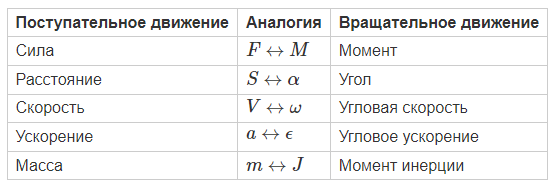
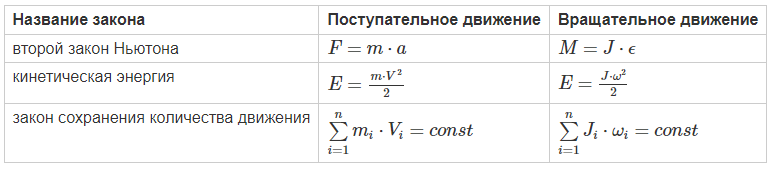
Законы движения также выглядят аналогичным образом
Вывод соотношения для требуемой угловой скорости маховика
Запишем закон сохранения кинетического момента системы спутник+маховик для моментов времени «1» и «2»:
Абсолютная скорость маховика, т.е. скорость маховика в инерциальной системе координат, например, связанной с Землей, представляет собой сумму угловой скорости спутника и угловой скорости маховика относительно спутника, т.е. относительной угловой скорости маховика:
Обращаем внимание, что маховик может измерять собственную угловую скорость относительно корпуса спутника или относительную угловую скорость.
Выразим угловую скорость маховика, которую необходимую задать
Обозначим отношение как .
Для работы алгоритма необязательно знать точное значение , т.к. маховик не может мгновенно установить требуемую угловую скорость. Также в процесс управления вмешиваются шумы измерений: угловая скорость спутника измеренная с помощью датчика угловой скорости не является точной, т.к. в измерениях всегда есть постоянная ошибка и шум измерений. Следует учесть, что измерения угловой скорости и выдача команд маховику происходят с некоторым минимальным шагом во времени. Все эти ограничения приводят к тому, что подбирается экспериментальным путем или строятся подробные компьютерные модели, которые учитывают все вышеописанные ограничения. В нашем случае коэффициент будем подбирать экспериментально.
Угловая скорость в момент времени «2» является целевой угловой скоростью, обозначим ее . Таким образом, если необходимо что спутник поддерживал угловую скорость , то зная текущую угловую скорость спутника и текущую угловую скорость маховика возможно рассчитать желаемую скорость маховика для поддержания режима «вращения с постоянной скоростью»:
Используя режим вращения с постоянной скоростью можно заставить спутник повернуться на любой угол если вращать спутник с постоянной скоростью определенное время. Тогда время, которое необходимо вращать спутник с постоянной скоростью , чтобы развернуться на требуемый угол определяется делением этих величин:
Если требуется чтобы спутник был застабилизирован, то и выражение приобретает более простой вид:
Задание для самостоятельной работы
1) Измените программу так, чтобы спутник вращался с постоянной скоростью.
2) Измените программу так, чтобы спутник работал по следующей циклограмме:
- стабилизация в течении 10 секунд,
- разворот на 180 градусов за время 30 секунд,
- снова стабилизация в течении 10 секунд.