Подготовка к работе через наземный УКВ
Установка ПО
Для приема и передачи данных по УКВ необходимо установить драйвер платы УКВ приемопередатчика и ПО Houston Server:
- Скачайте и установите драйвер укв_usb_driver.zip;
- Скачайте и разархивируйте в корень диска «С:» Houston Control Center.
Запуск Houston Server
Подключите наземный УКВ приемопередатчик к компьютеру через USB. Запустите файл houston_server.exe Так как в системе уже установлен драйвер наземного УКВ, то Houston Server подключится к нему автоматически, вручную настраивать COM-порт не нужно (рисунок 1).
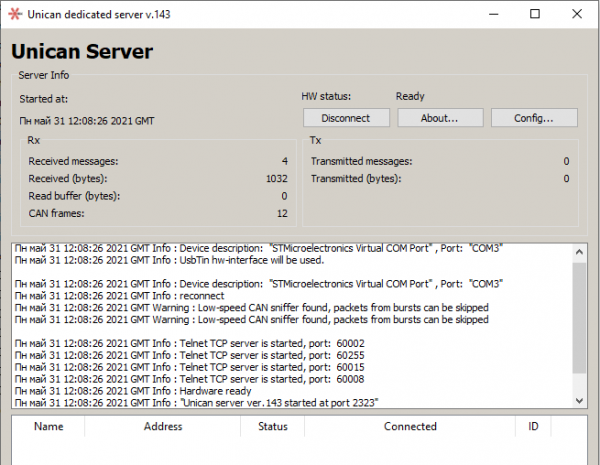
Рисунок 1. Запуск Houston Server и подключение к УКВ
Наземный УКВ подключится к Houston Server, и число рядом с CAN Rx, показывающее общее количество принятых кадров данных (сообщений), станет увеличиваться.
В случае подключения двух и более наземных УКВ приемопередатчиков Houston Server предложит выбрать, к какому устройству подключиться (рисунок 2):
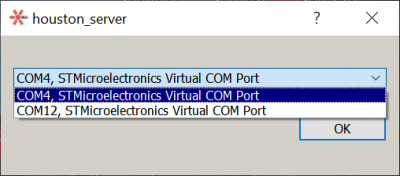
Рисунок 2. Выбор устройства
Запуск Houston Application
Запустите файл houston_app.exe(рисунок 3):
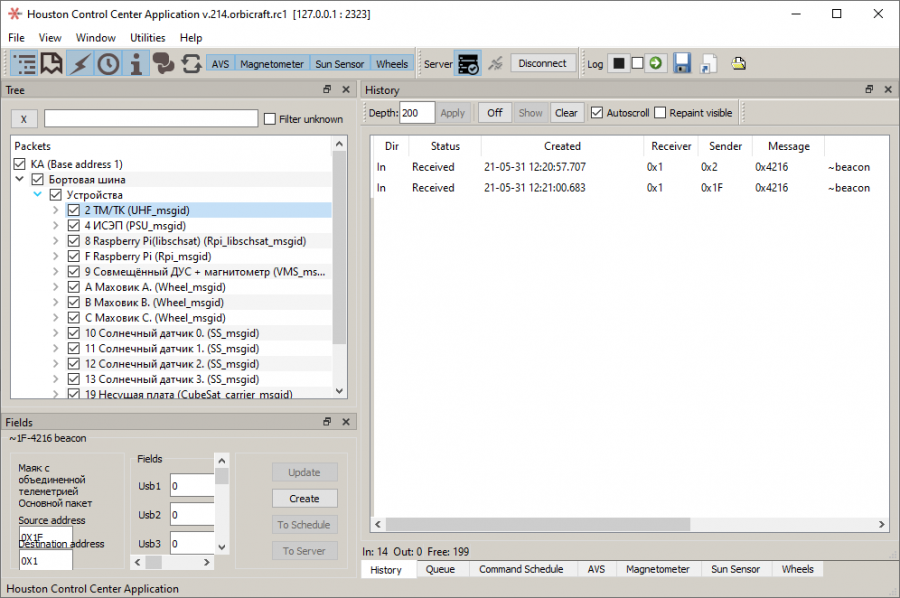
Рисунок 3. Интерфейс программы Houston Application
Если Houston App подключен к Houston Server, то в правом окне с интервалом в несколько секунд будут появляться «маяки» от бортового и наземного УКВ приемопередатчиков.
Если от одного из передатчиков маяки не появляются, то, возможно, у него стоит задержка передачи маяков BeaconStartupDelay в значении 900 секунд. Подождите 15 минут и маяки появятся. Либо измените значение параметра BeaconStartupDelay в настройках.
Houston App автоматически подключится к Houston Server, если у них в настройках заданы одинаковые следующие параметры:
- ServerPort Houston App = TcpPort Houston Server (по умолчанию 2323);
- ServerAddress Houston App = 127.0.0.1.
Устранение ошибок подключения
Если автоматического подключения Houston App к Houston Server не происходит, то надо открыть диспетчер устройств и убедится, что наземный УКВ подключён к COM-порту (рисунок 4):

Рисунок 4. Выбор устройства
Если COM-порт подключен в диспетчере устройств, а сервер не подключается, необходимо проверить в конфигурации сервера параметр Interface, где должно быть прописано usbtin (рисунок 5):
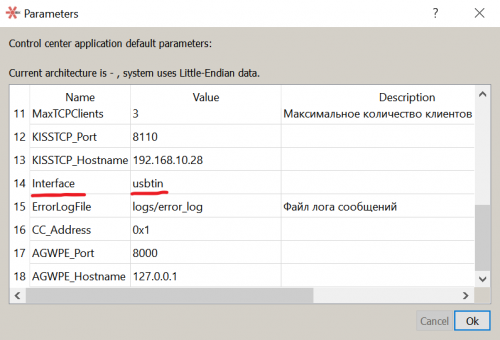
Рисунок 5. Настройка конфигурации устройства в Houston Server
Также подключение Houston App к Houston Server не произойдет если у наземного и бортового передатчиков заданы разные значения рабочей частоты, битрейта и не соответствуют позывные CallSign и EarthCallSign. Увидеть значения этих параметров у наземного приемопередатчика можно после отправки команды 1F-4202 request_AllConfiguration (рисунок 6):
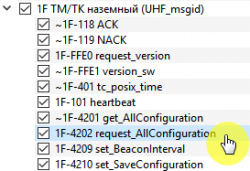
Рисунок 6. Параметры наземного приемопередатчика
Будет получен ответ ~1F-4201 get_AllConfiguration с информацией о рабочей частоте, битрейте и позывным CallSign и EarthCallSign (рисунок 7):
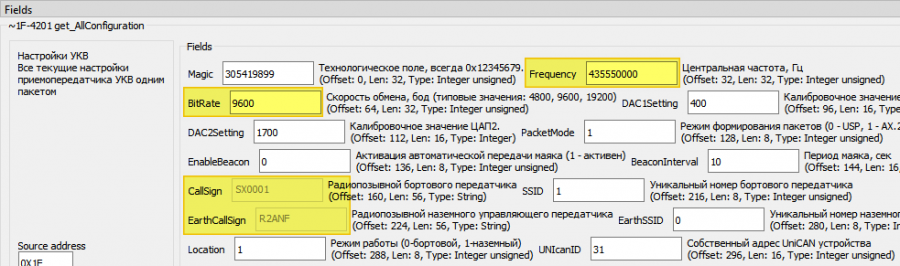
Рисунок 7. Ответ с информацией
Адресное пространство
Наземный УКВ приемопередатчик UHV GND (адрес 0x1F) по УКВ радиоканалу частотой около 435 МГц обменивается данными с бортовым УКВ приемопередатчиком UHV BRD (адрес 0x2) по протоколу AX.25.
Данные с наземного УКВ приемопередатчика UHV GND (адрес 0x1F) по кабелю USB передаются на компьютер с установленным Houston Server (адрес 0x1), который взаимодействует по протоколу TCP/IP с Houston App или Houston Telnet Client.
Данные с бортового УКВ приемопередатчика UHV BRD (адрес 0x2) передаются на все бортовые устройства через CAN-шину по следующим адресам:
- Маховики - адреса 0xA, 0xB, 0xC
- Arduino shield - адрес 0x1A
- бортовой УКВ - адрес 0x2
- БВМ - адрес 0x19
- ДУС и магнитометр - адрес 0x9
- Raspberry Pi - адрес 0x8 (для запуска программ, использующих библиотеку libshcsat.h)
- Raspberry Pi - адрес 0xF (для запуска программ, не использующих библиотеку libshcsat.h)
- Солнечные датчики - адреса 0x10, 0x11, 0x12, 0x13
- СЭП - адрес 0x4