Preparing to work via terrestrial UHF
Software Installation
To receive and transmit UHF data, you must install the UHF transceiver board driver and the Houston Server software:
- Download and install the driver укв_usb_driver.zip ;
- Download and unzip to the root of the disk "C:" Houston Control Center.
Starting the Houston Server
Connect the terrestrial UHF transceiver to your computer via USB. Run the file houston_server.exe Since the UHF terrestrial driver is already installed in the system, the Houston Server will connect to it automatically, you do not need to manually configure the COM port (Figure 1).
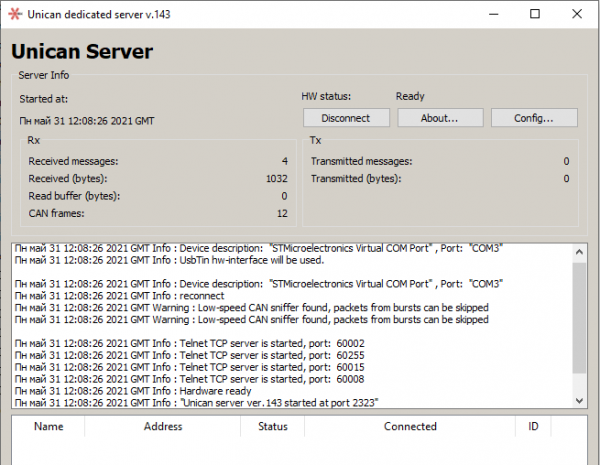
Figure 1. Starting the Houston Server and connecting to UHF_
The terrestrial UHF will connect to the Houston Server, and the number next to the CAN Rx, showing the total number of received data frames (messages), will increase.
If two or more terrestrial UHF transceivers are connected Houston Server will prompt you to select which device to connect to (Figure 2):
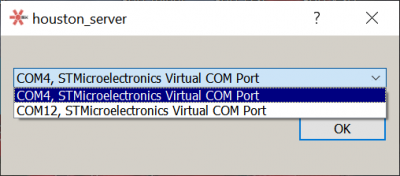
Picture 2. Device selection_
Launching the Houston Application
Run the file houston_app.exe (Figure 3):
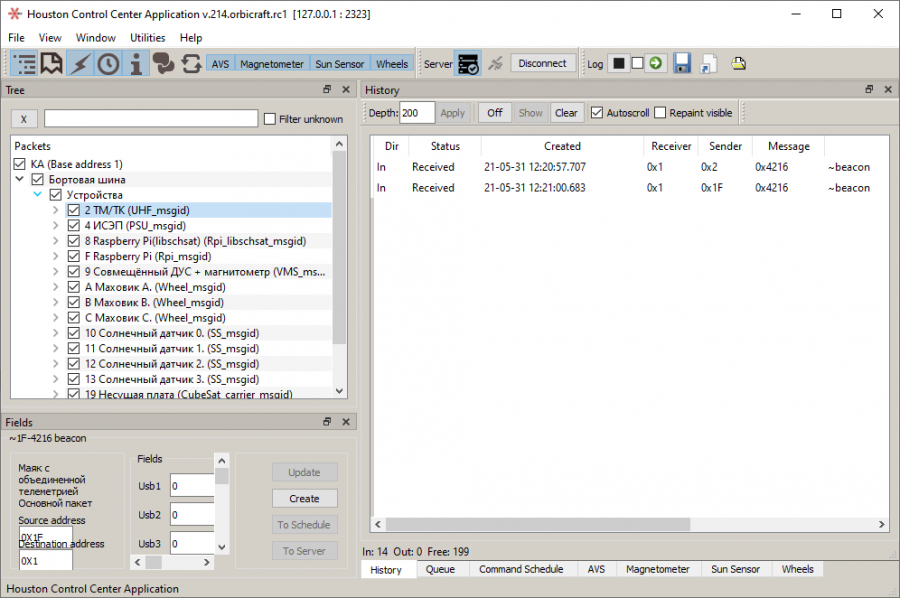
Figure 3. The interface of the Houston Application program_
If Houston App is connected to Houston Server, then "beacons" from on-board and ground UHF transceivers will appear in the right window with an interval of several seconds.
If beacons do not appear from one of the transmitters, then it may have a delay in transmitting beacons BeaconStartupDelay in the value of 900 seconds. Wait 15 minutes and the beacons will appear. Or change the value of the BeaconStartupDelay parameter in the settings.
Houston App will automatically connect to Houston Server if the following parameters are set in their settings:
- ServerPort Houston App = TcpPort Houston Server (default 2323 );
- ServerAddress Houston App = 127.0.0.1.
Troubleshooting connection errors
If the automatic connection of Houston App to Houston Server does not occur, then you need to open the device manager and make sure that the terrestrial UHF is connected to the COM port (Figure 4):
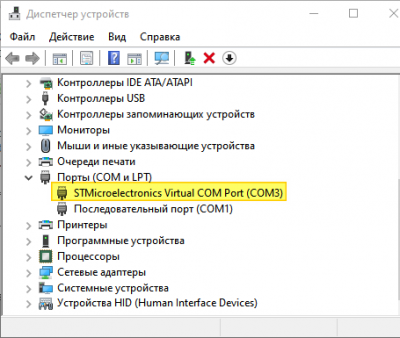
Figure 4. Device selection_
If the COM port is connected in the device manager, but the server is not connected, you need to check the Interface parameter in the server configuration, where usbtin should be written (Figure 5):
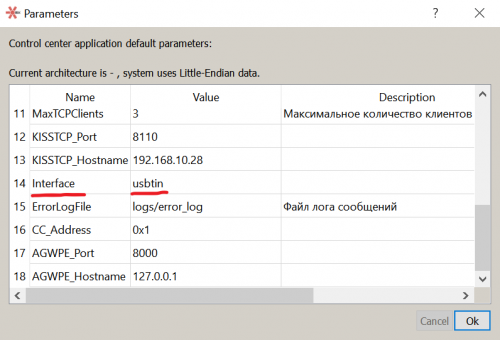
Figure 5. Configuring the device configuration in Houston Server_
Also, the connection of the Houston App to the Houston Server will not occur if the ground and on-board transmitters have different operating frequency and bitrate values and the call signs CallSign and EarthCallSign do not match. You can see the values of these parameters at the ground transceiver after sending the command 1F-4202 request_AllConfiguration (Figure 6):
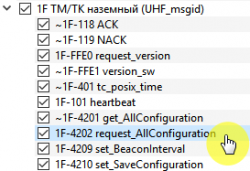
Figure 6. Parameters of the ground transceiver_
A response will be received ~1F-4201 get_AllConfiguration with information about the operating frequency, bitrate and callsign CallSign and EarthCallSign (Figure 7):
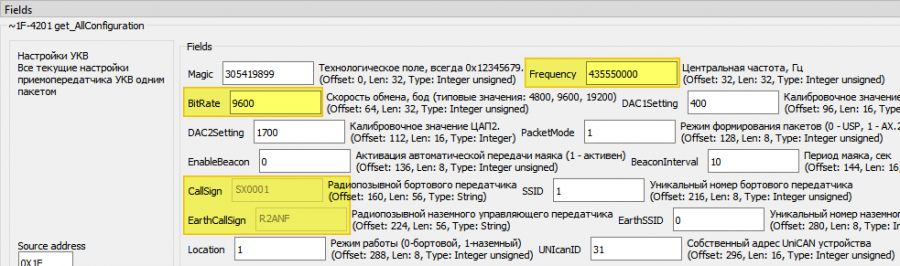
Picture 7. Response with information_
Address space
The terrestrial UHF transceiver UHV GND (address 0x1F) over a UHF radio channel with a frequency of about 435 MHz communicates with the on-board UHF transceiver UHV BRD (address 0x2) over the protocol AX.25.
Data from the terrestrial UHF transceiver UHV GND (address 0x1F) is transmitted via USB cable to a computer with the installed Houston Server (address 0x1), which interacts via the TCP/IP protocol with the Houston App or Houston Telnet Client.
Data from the on-board UHF transceiver UHV BRD (address 0x2) is transmitted to all on-board devices via the CAN bus at the following addresses:
- Flywheels - addresses 0xA, 0xB, 0xC
- Arduino shield - address 0x1A
- on-board UHF address 0x2
- OBC address 0x19
- AVS and magnetometer - address 0x9
- Raspberry Pi address 0x8 (to run programs using the library libshcsat.h)
- Raspberry Pi address 0xF (to run programs not using the library libshcsat.h)
- Solar sensors - addresses 0x10, 0x11, 0x12, 0x13
- PSS address 0x4