Сборка Нижней части трехосной конфигурации
Для сборки данной части конструктора Вам необходимо использовать третий ложемент с деталями и оставшуюся плату СЭП из второго ложемента (рисунок 1):
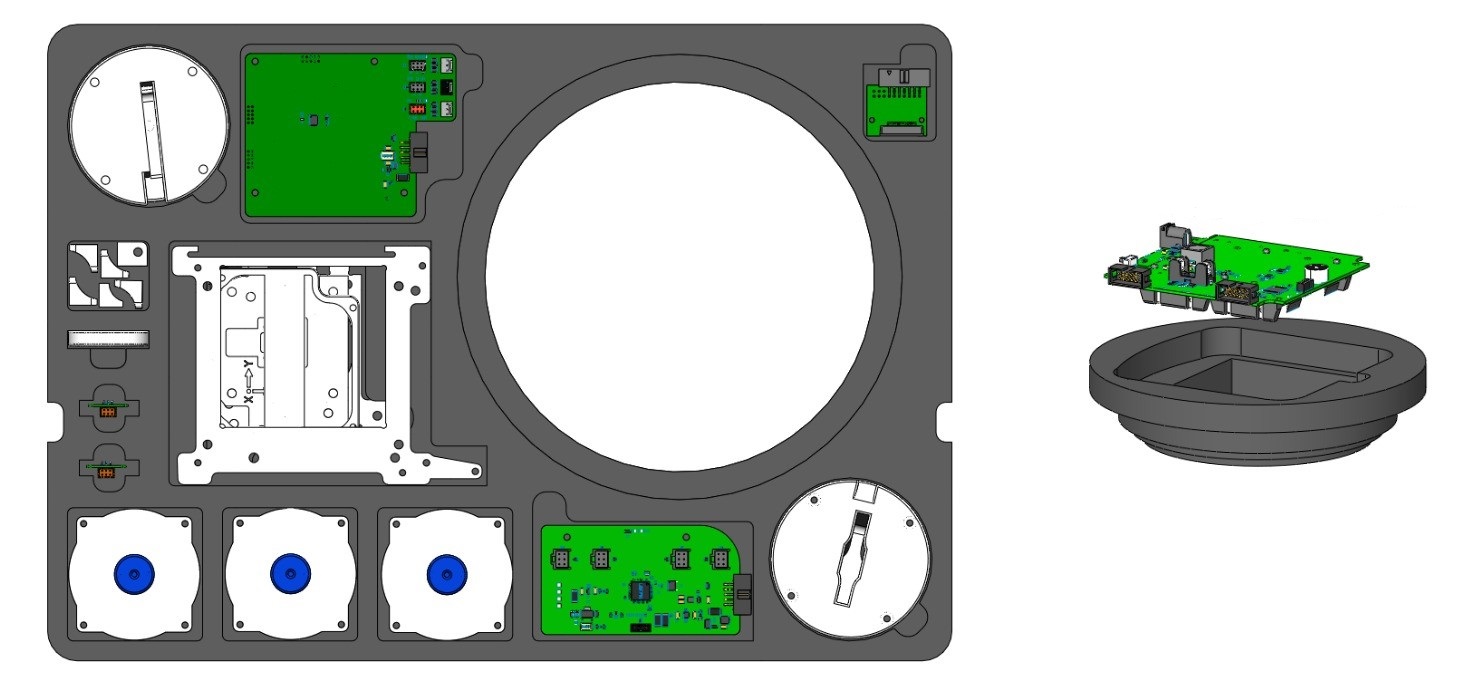
Рисунок 1. Компоненты, необходимые для сборки нижней части конструктора.
Компоненты, необходимые для сборки:
- Плата управляющего двигателя-маховика – 1 шт.;
- Маховик – 3 шт.;
- Плата-переходник для камеры – 1 шт.;
- Плата системы электропитания – 1 шт.;
- Батарейки – 4 шт.;
- Плата энкодера – 2 шт.;
- Плата солнечных датчиков – 1 шт.;
- Винты М2х6 – 10 шт.;
- Винты М3х6 – 32 шт.;
- Винты М3х10 – 2 шт.;
- Латунная стойка PCHSN-5 – 12 шт.;
- Латунная стойка PCHSN-12 – 8 шт.;
- Латунная стойка PCHSS-30 – 1 шт.
Порядок сборки
Для удобства сборки маховики отличаются длиной провода: маховик A обладает наиболее длинным проводом, а маховик C – наименьшим.
Сборка маховика А (для вращения аппарата вокруг оси Х)
К стенке со стороны, где выгравирована X, прикрутить тройной уголок с помощью одного винта М3х6 (рисунок 2).
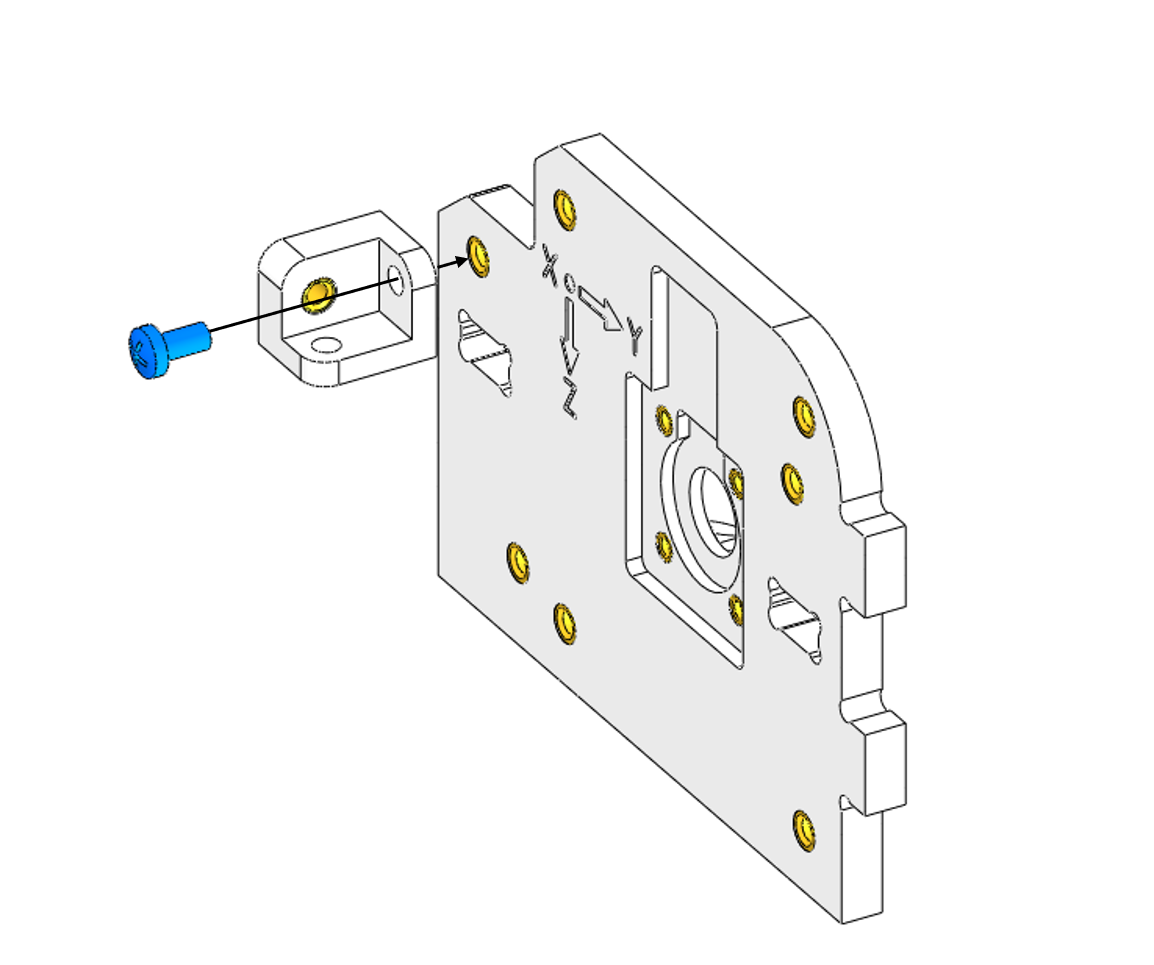
Рисунок 2. Стенка корпуса маховика А с тройным уголком.
С помощью четырех винтов М2х6 прикрутить к корпусу плату энкодера (рисунок 3).
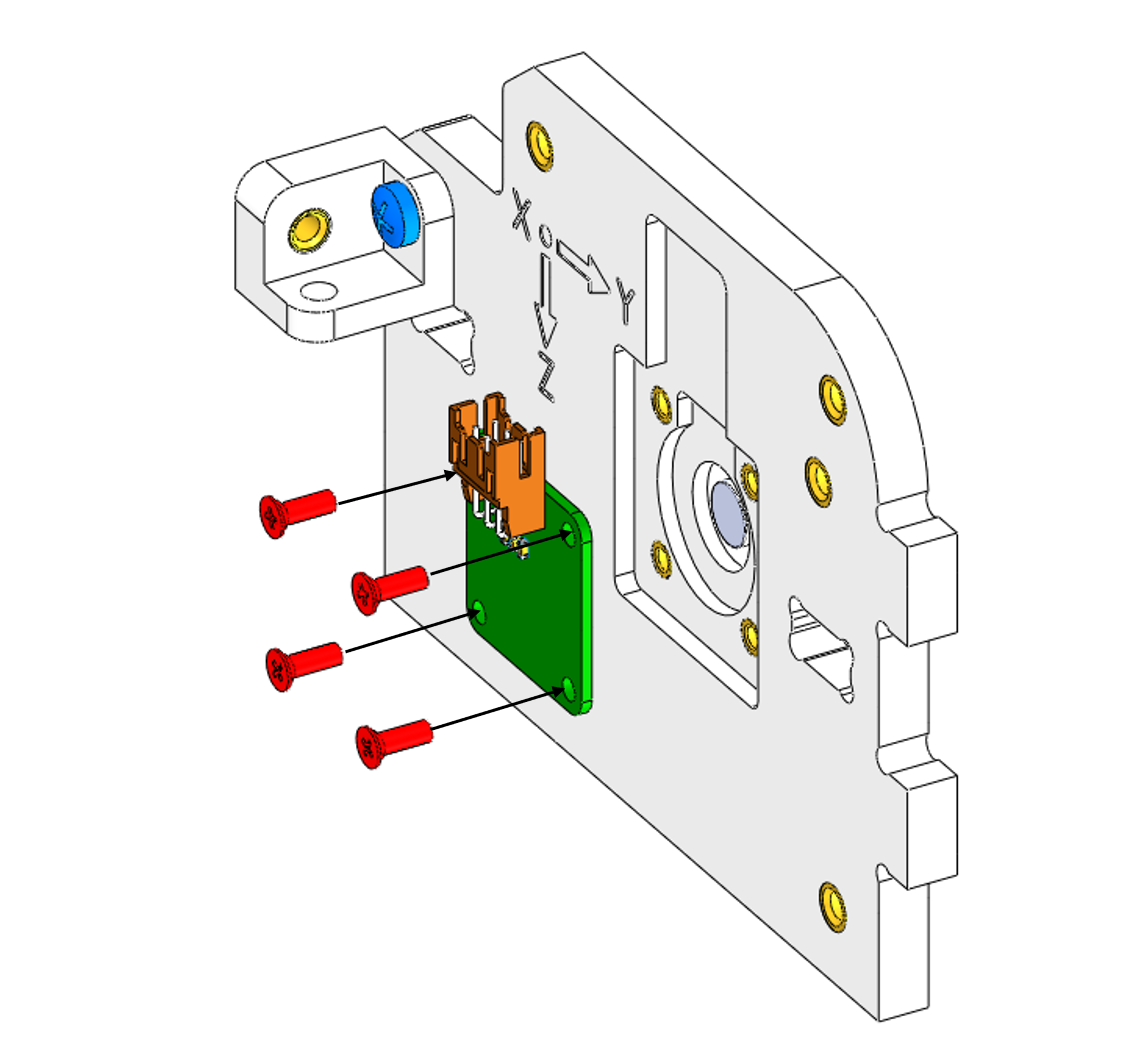
Рисунок 3. Соединение платы энкодера со стенкой корпуса маховика А.
С обратной стороны стенки прикрутить уголок с помощью одного винта М3х6 (рисунок 4).
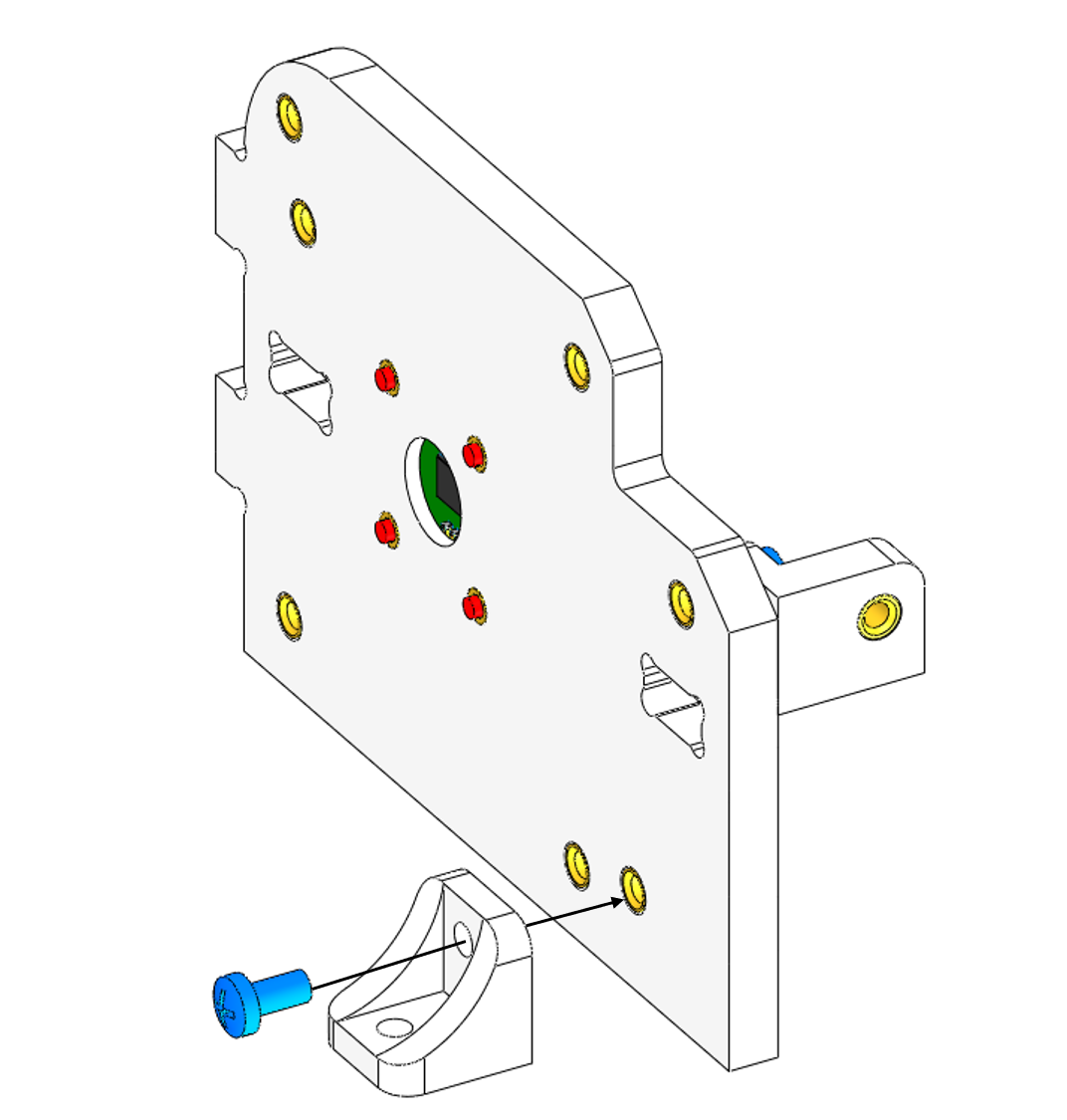
Рисунок 4. Обратная сторонка стенка корпуса маховика А с уголком.
При помощи четырех латунных стоек PCHSN-12 и четырех винтов М3х6 соединить двигатель-маховик с корпусом (рисунок 5).
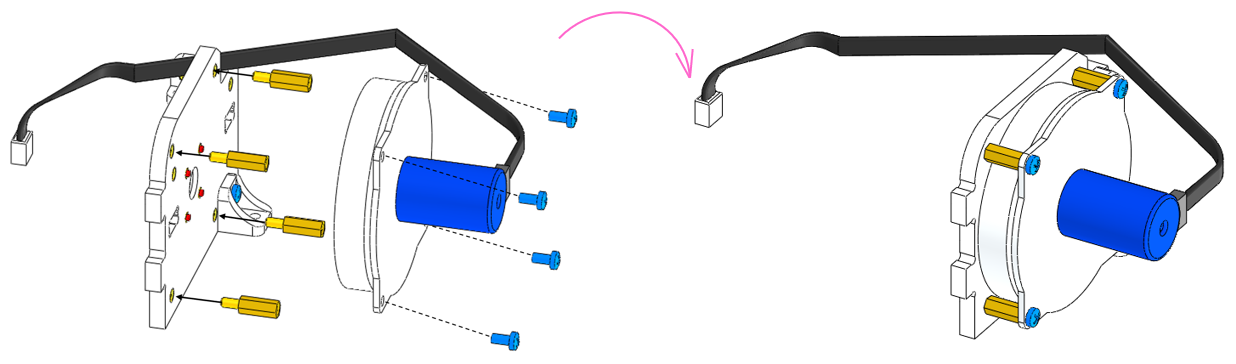
Рисунок 5. Соединение двигателя-маховика А с корпусом.
Сборка маховика B (для вращения аппарата вокруг оси Y)
К стенке со стороны, где выгравирована Y, прикрутить уголок с помощью одного винта М3х6 (рисунок 6).
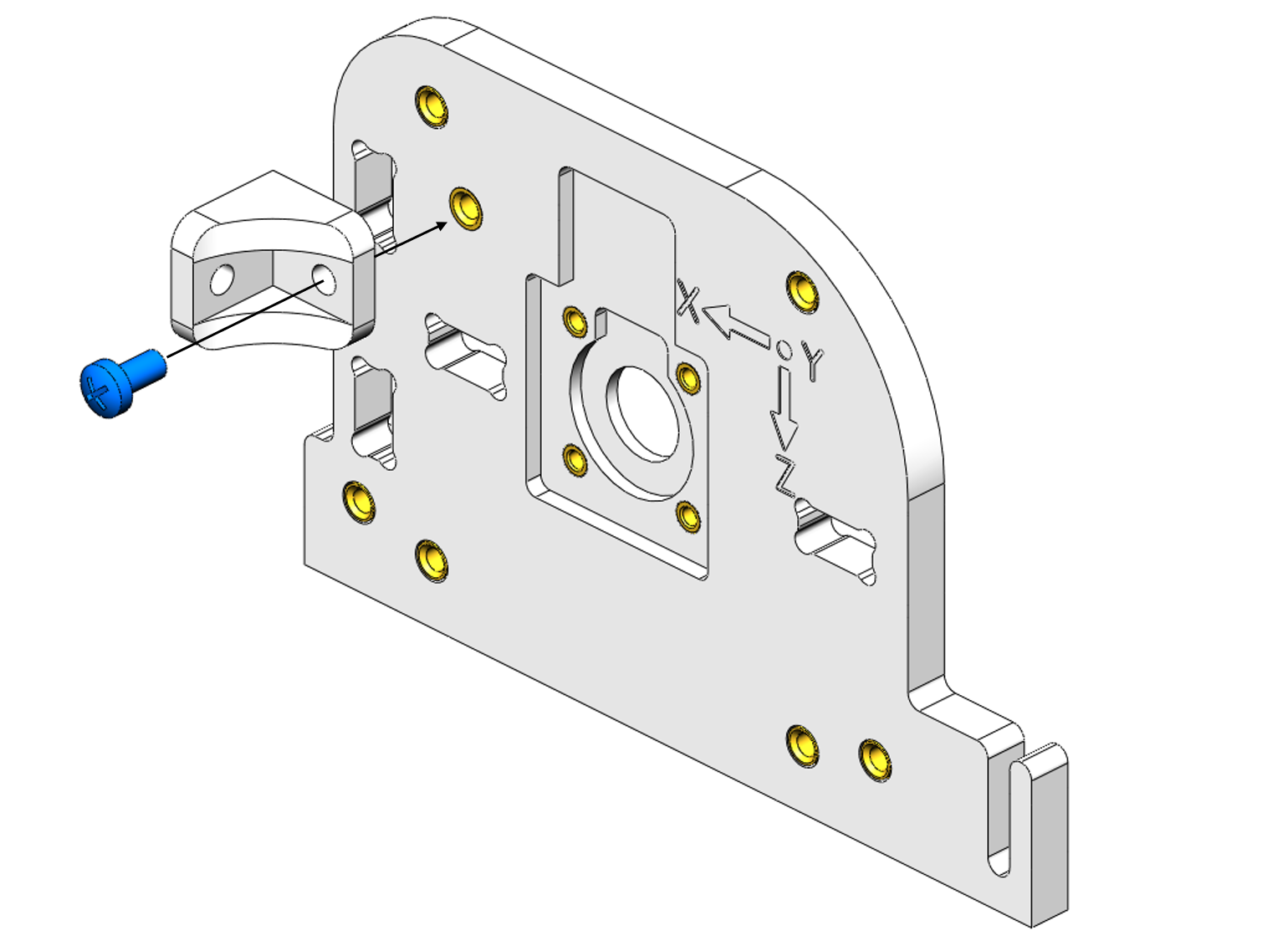
Рисунок 6. Стенка корпуса маховика В с уголком.
С помощью четырех винтов М2х6 прикрутить к корпусу плату энкодера (рисунок 7).
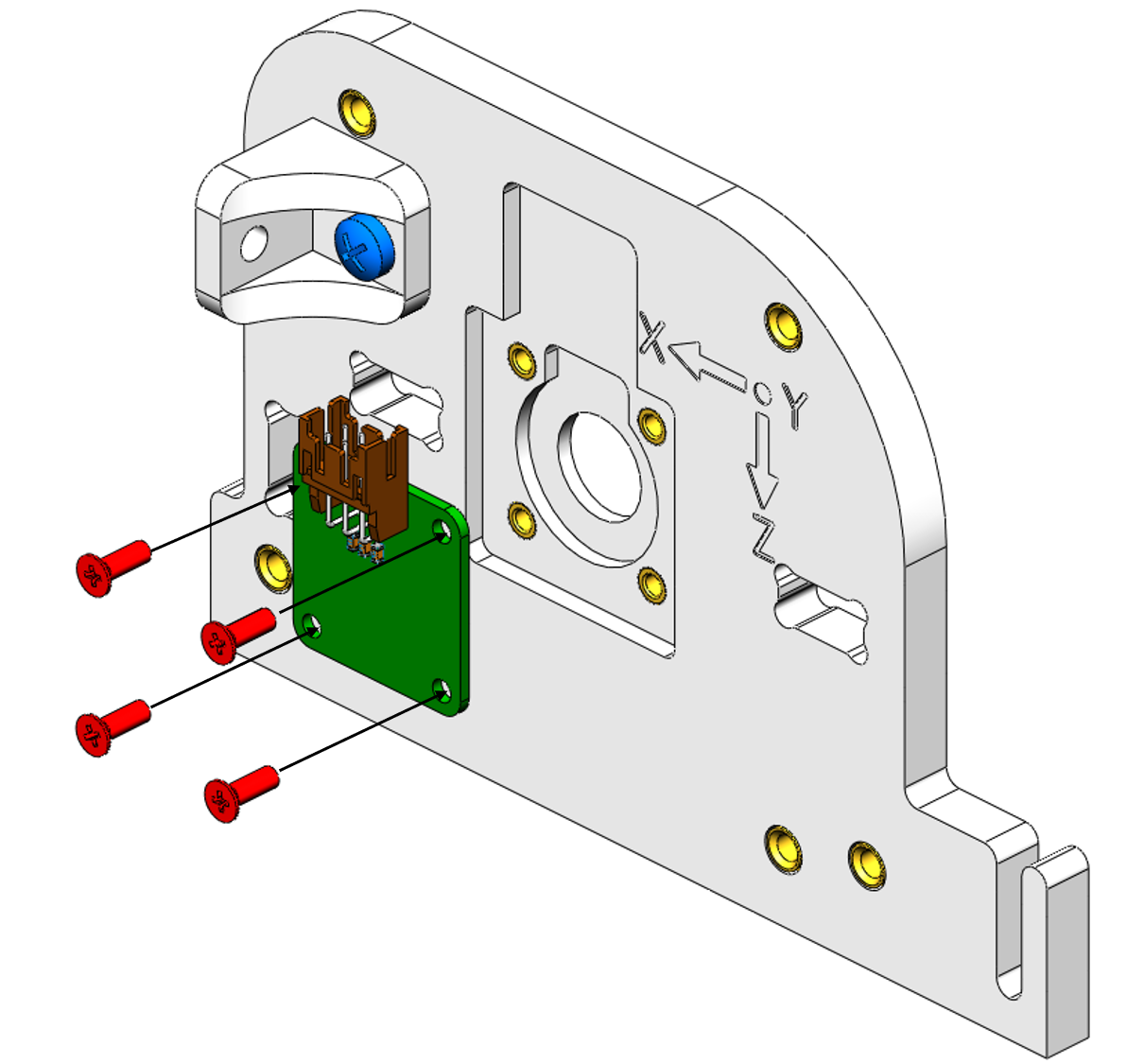
Рисунок 7. Соединение платы энкодера со стенкой корпуса маховика В.
С обратной стороны стенки прикрутить два уголка с помощью двух винтов М3х6 (рисунок 8).
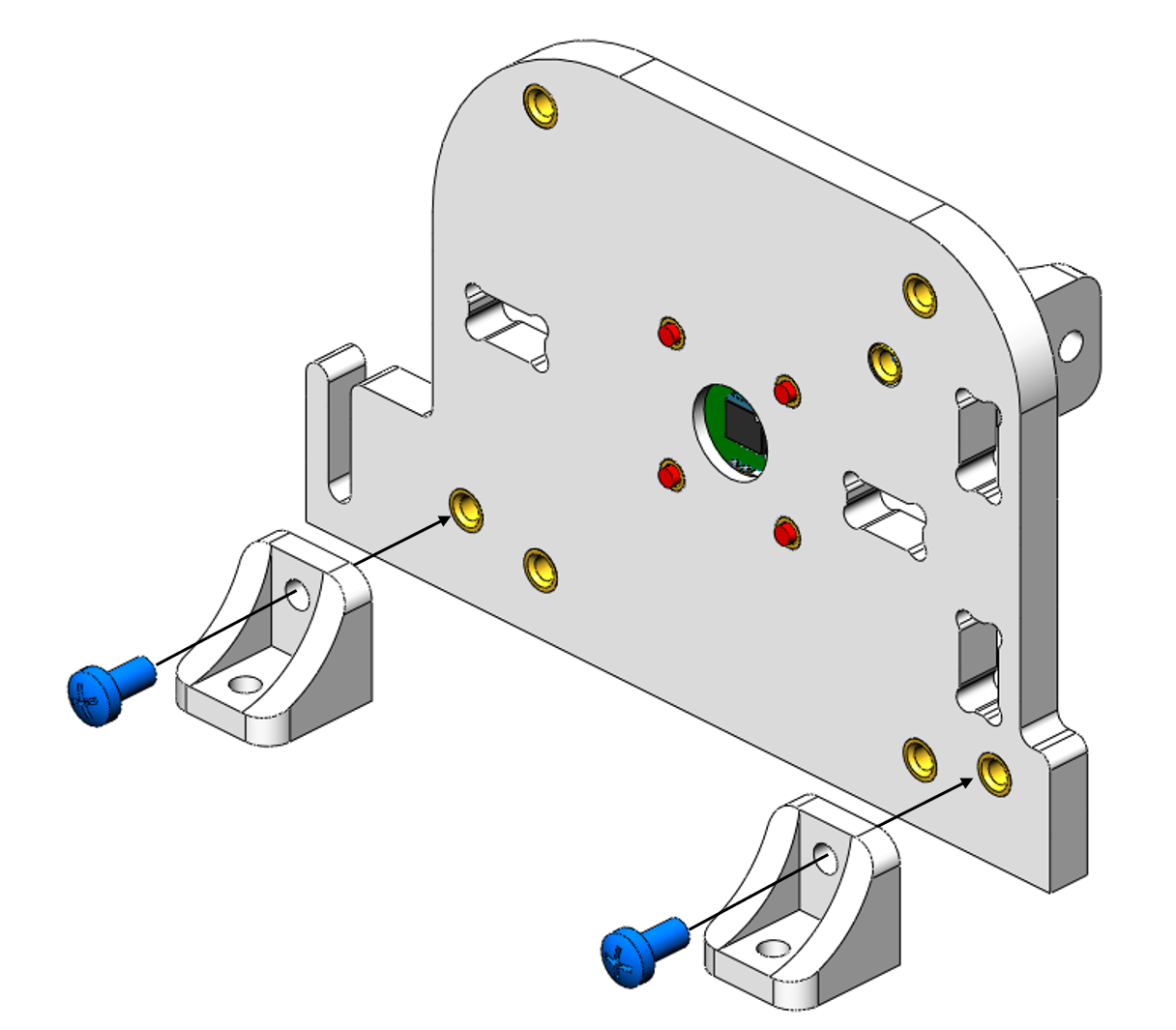
Рисунок 8. Обратная сторона стенки корпуса маховика В с двумя уголками.
С обратной стороны от платы энкодера вкрутить четыре латунные стойки PCHSN-12. При помощи четырех винтов М3х6 соединить двигатель-маховик с корпусом (рисунок 9).
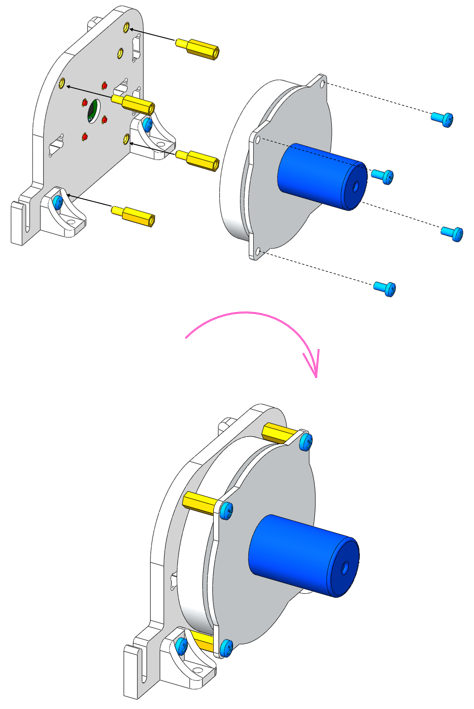
Рисунок 9. Соединение латунных стоек с корпусом.
Сборка маховика C (для вращения аппарата вокруг оси Z)
К основанию корпуса, где выгравирована Z, с обратной стороны прикрутить четыре латунные стойки PCHSN-5 (рисунок 10).
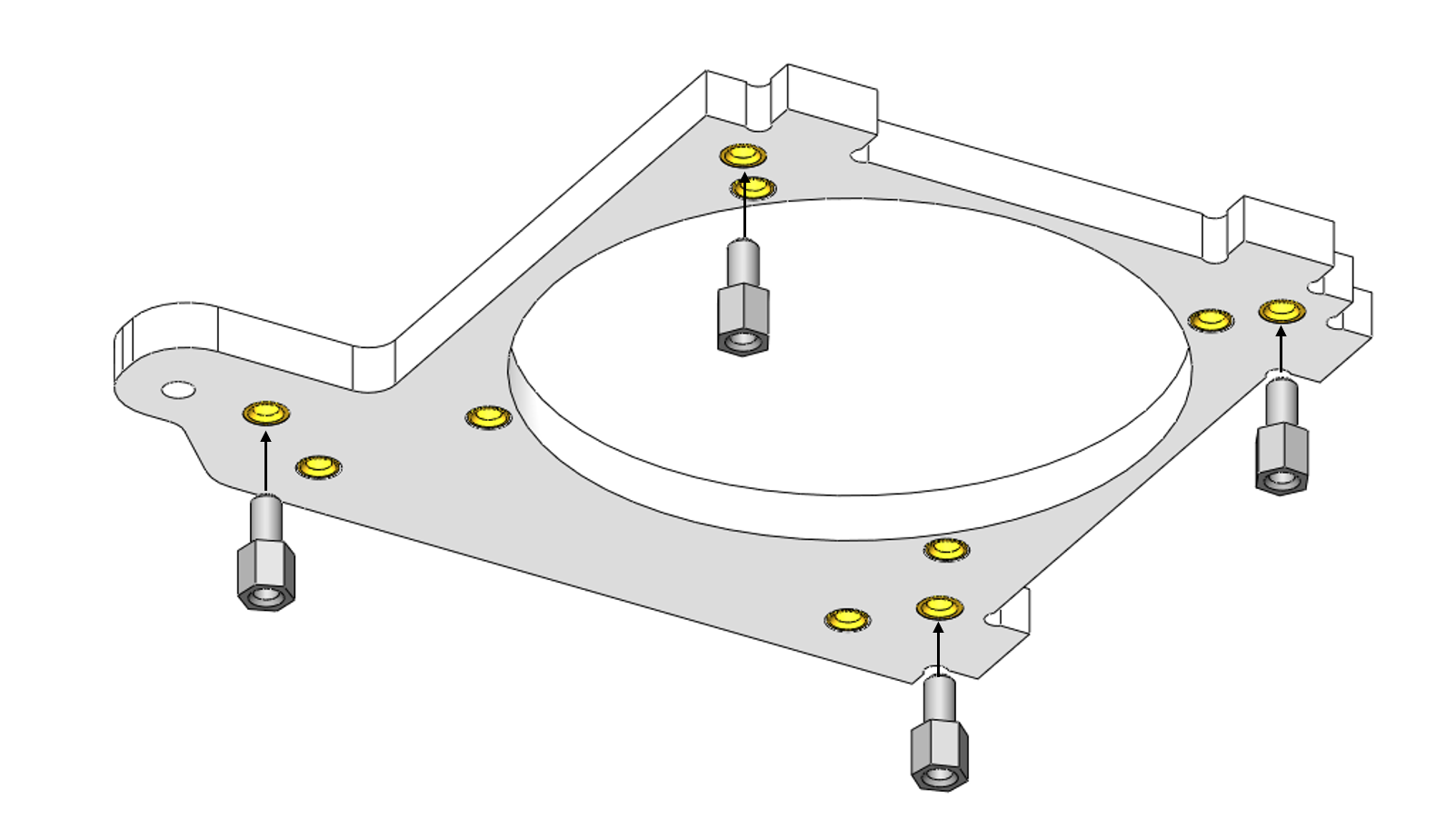
Рисунок 10. Основание корпуса маховика.
С помощью четырех латунных стоек PCHSN-5 соединить рамку корпуса с платой управляющего двигателя-маховика (рисунок 11).
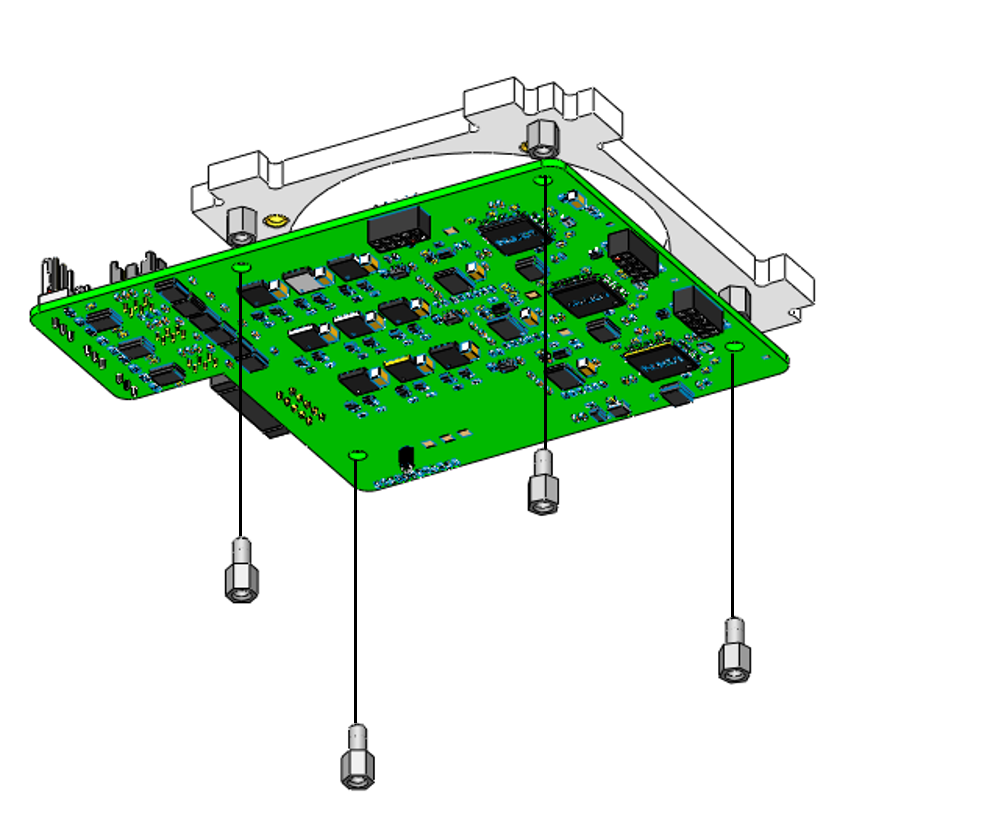
Рисунок 11. Соединение корпуса основного маховика с платой управляющего двигателя-маховика.
Закрыть плату рамкой корпуса с помощью четырех винтов М3х6 (рисунок 12).
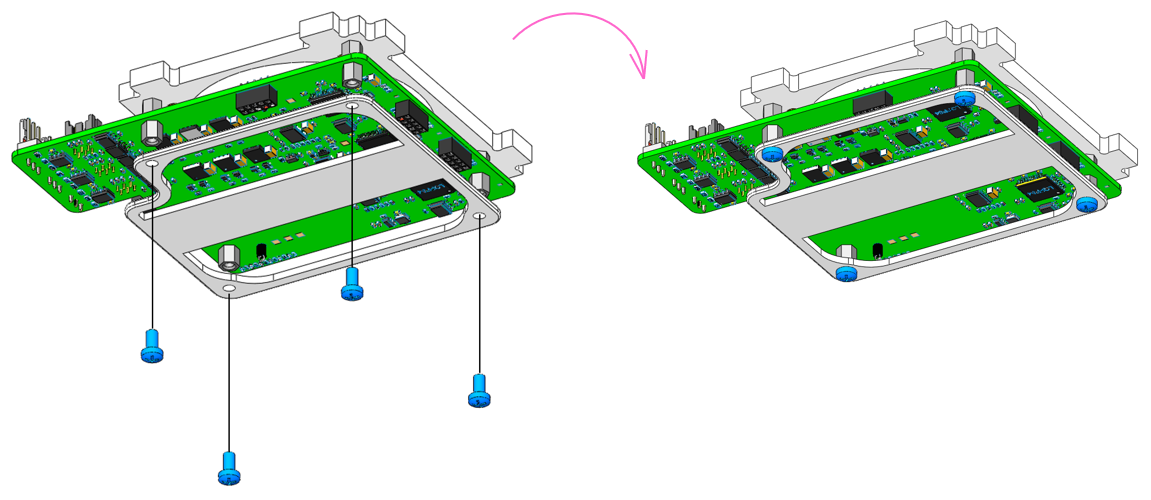
Рисунок 12. Соединение рамки корпуса с платой управляющего двигателя-маховика.
С помощью четырех винтов М3х6 и четырех латунных стоек PCHSN-5 соединить маховик с основанием. Подключить шлейф маховика к центральному разъему на плате (рисунок 13).
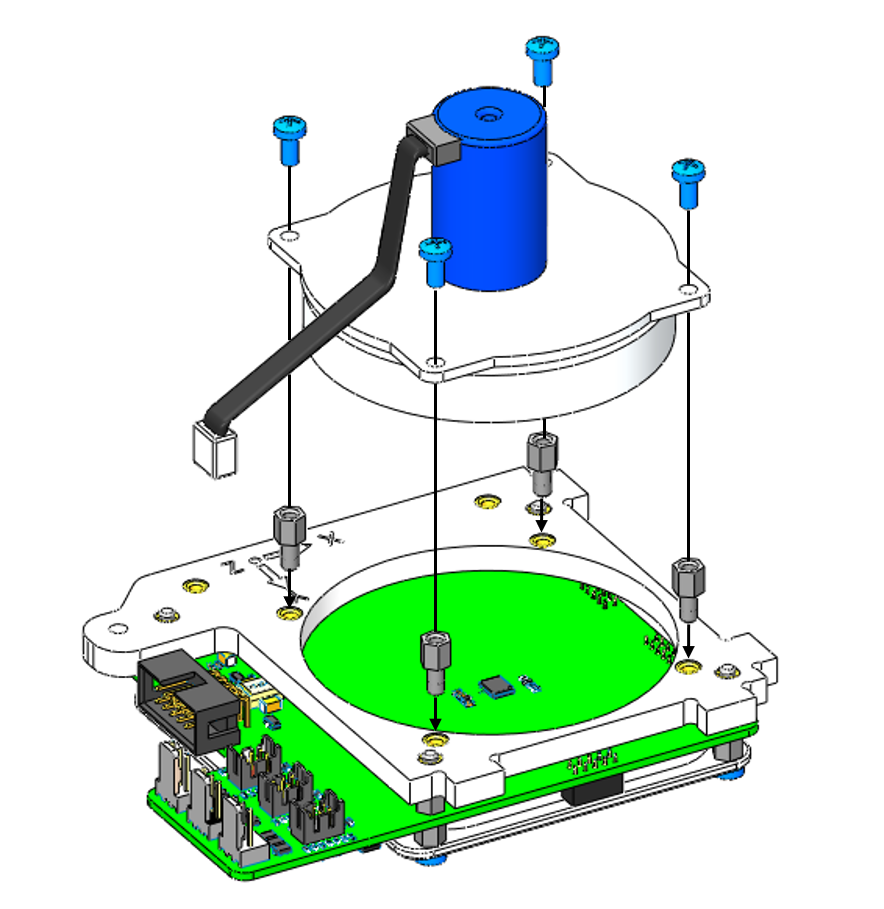
Рисунок 13. Соединение корпуса с маховиком.
С помощью винта М3х6 соединить уголок с основанием (рисунок 14).

Рисунок 14. Соединение уголка с основанием.
Сборка системы электропитания
С помощью трех винтов М3х6 прикрутить плату системы электропитания к корпусу так, чтобы область для аккумуляторных батарей находилась в вырезе (рисунок 15).

Рисунок 15. Плата системы электропитания с основанием модуля.
Вставить четыре батарейки в разъемы, соблюдая полярность (знак «+» на батарейке соответствует знаку «+» на разъеме, аналогично со знаками «-») (рисунок 16).
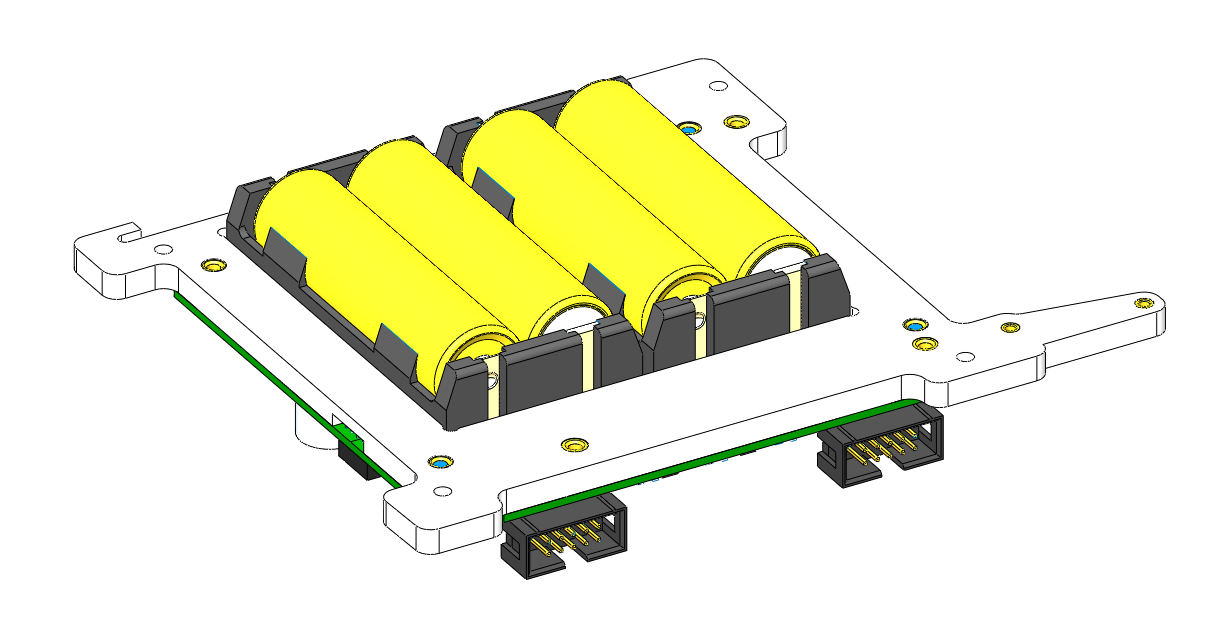
Рисунок 16. Положение батареек.
С помощью двух винтов М2х6 соединить плату-переходник для камеры с выпуклой частью основания (рисунок 17).
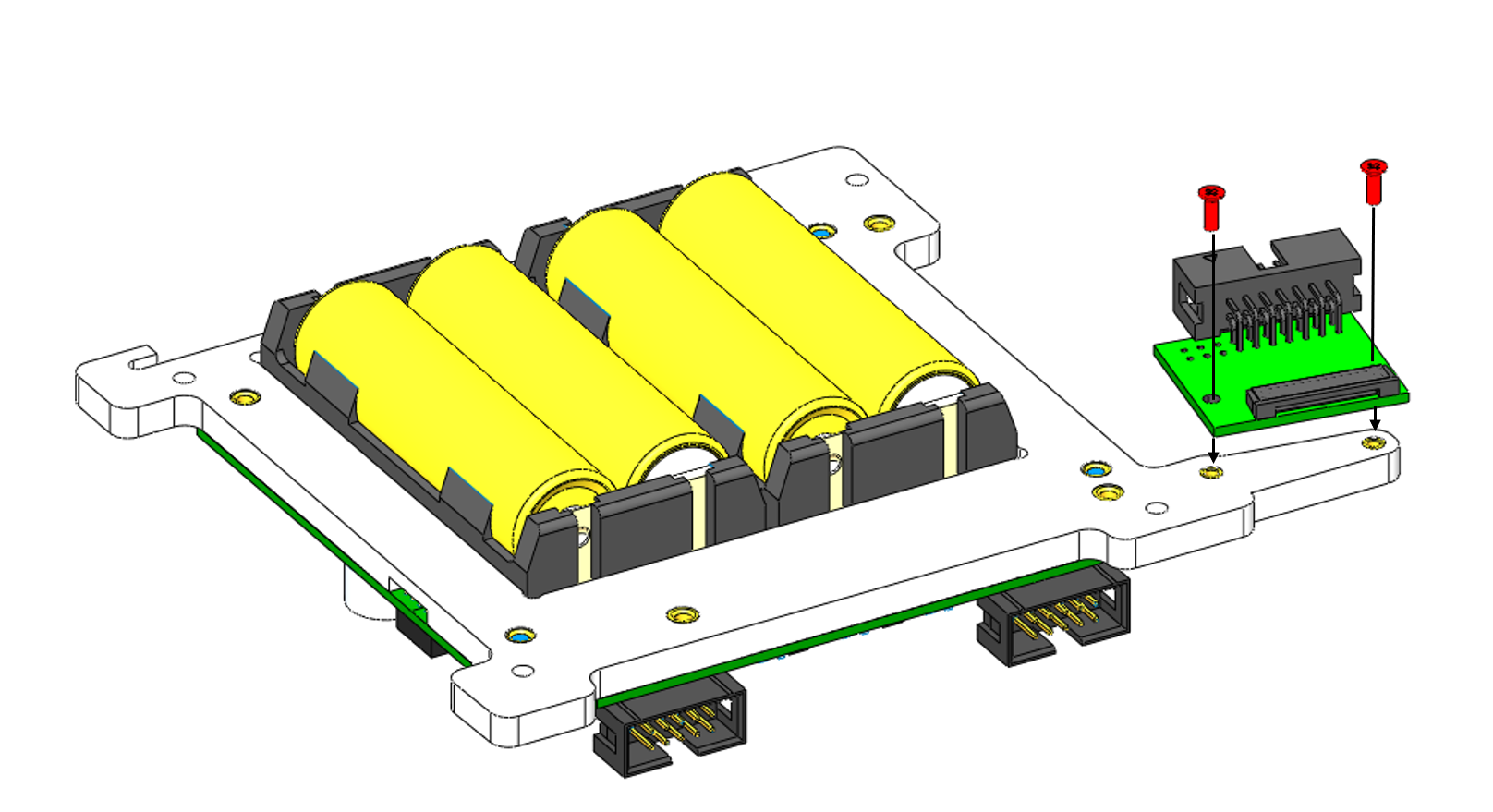
Рисунок 17. Соединение платы-переходника для камеры с основанием.
Общая сборка
Блок маховика A соединить с блоком маховика C с помощью винта М3х6 через уголок и пазы в корпусе. Шлейф маховика A подключить в левый разъем со стороны платы энкодера (рисунок 18).
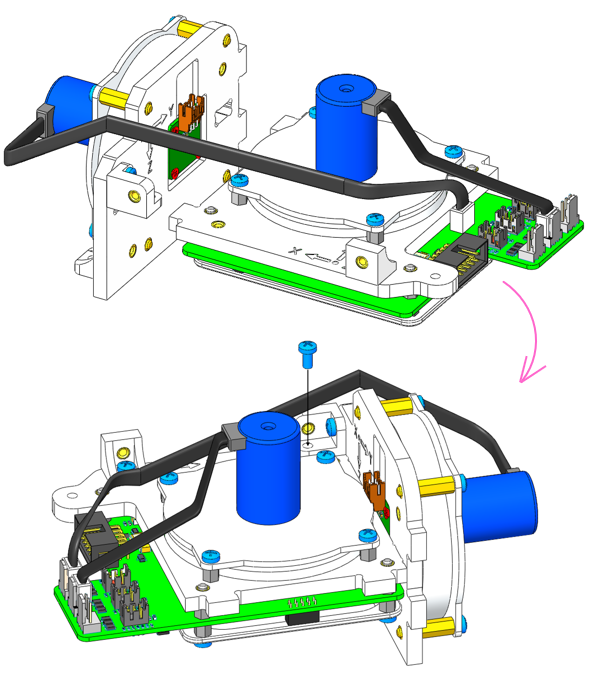
Рисунок 18. Соединение блоков маховиков А и С.
Блок маховика B соединить с блоком маховика C с помощью винта М3х6 через уголок и пазы в корпусе. Шлейф маховика B подключить в ближайший к блоку разъем (рисунок 19).

Рисунок 19. Соединение блоков маховиков В и С.
Подключить шлейфами платы энкодеров к плате двигателей-маховиков только Х и У - для Z подключение не требуется (рисунок 20).

Рисунок 20. Подключение плат энкодеров.
К корпусу блока C в выступающий угол вкрутить винт М3х10 с латунной стойкой PCHSS-30. Через уголки соединить блок маховиков с блоком системы электропитания с помощью трех винтов М3х6 и одного винта М3х10, проходящего через латунную стойку (рисунок 21).
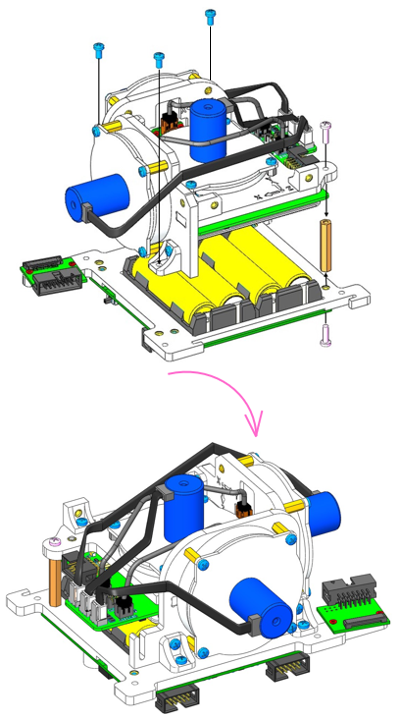
Рисунок 21. Соединение блока маховиков и системы электропитания.
С помощью двух винтов М3х6 соединить плату солнечных датчиков с модулем. Плата размещается в вырезах на корпусе (рисунок 22).
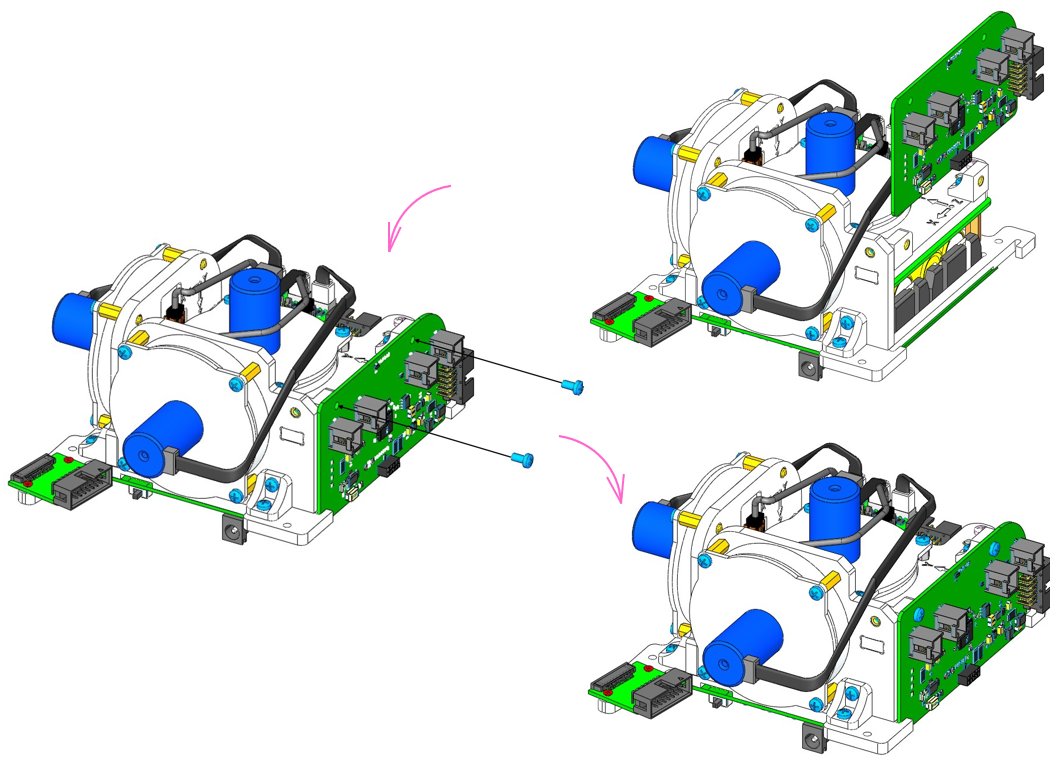
Рисунок 22. Соединение платы солнечных датчиков с модулем.