Сборка модуля БВМ (бортовой вычислительный модуль)
Бортовой вычислительный модуль –основной модуль, который обеспечивает обработку и отправку телеметрии, сформированную в датчике угловой скорости (ДУС) и магнитометре. Он так же предоставляет доступ к плате Raspberry Pi посредством Wi-Fi модуля или CAN-соединения, а также производить вычисления ориентации спутника с помощью микроконтроллера системы ориентации и стабилизации (СОС). Так же с помощью Wi-Fi модуля, установленного на БВМ, происходит подключение к компьютеру.
Телеметрия – это удаленный сбор, обработка и отправка данных при помощи различных датчиков.
Компоненты, необходимые для сборки (рисунок 1):
- все детали с надписью БВМ (два основания, две стенки, две прозрачные панели);
- плата БВМ;
- крепеж (винты с цилиндрической головкой М3х6 – 4 шт.).
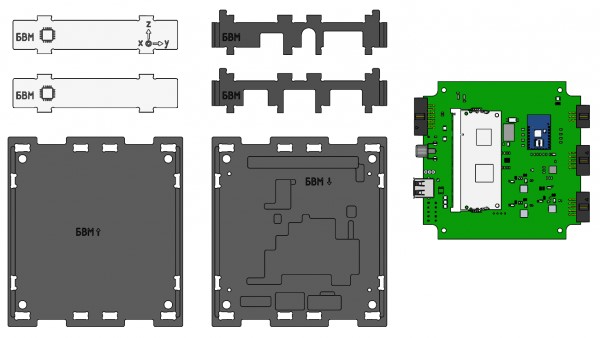
Рисунок 1. Компоненты для сборки модуля
Порядок сборки
1) На нижнее основание (обозначено: БВМ ↓) установить плату БВМ (рисунок 2):
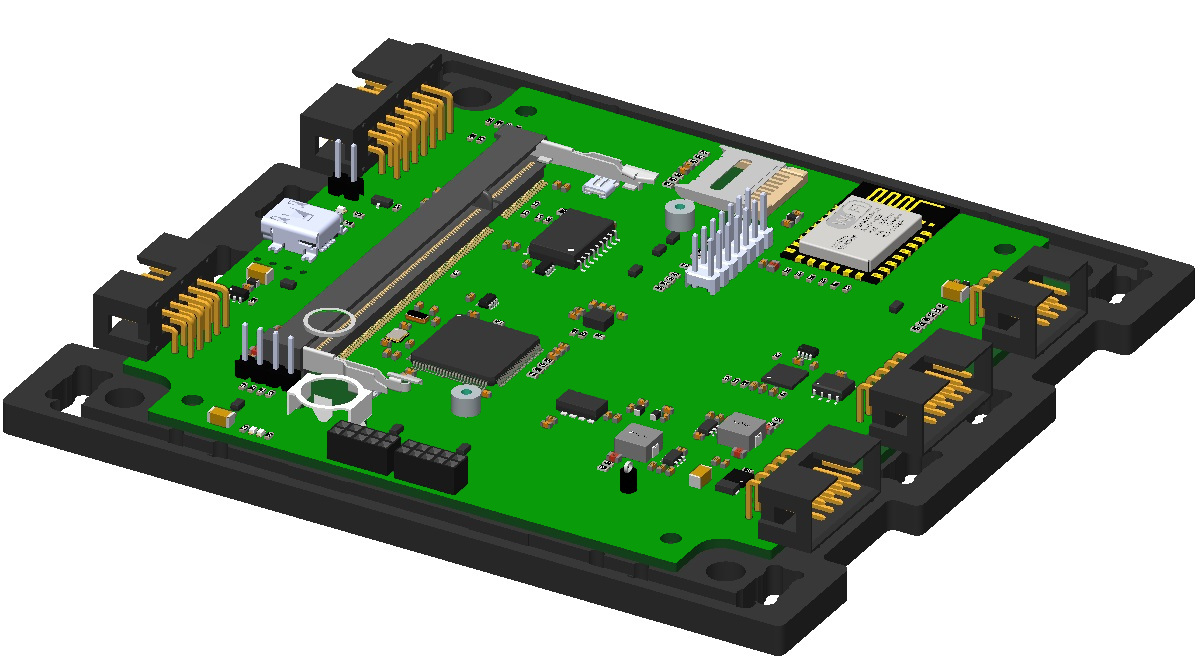
Рисунок 2. Основание БВМ
2) Закрепить плату на нижнем основании винтами М3х6 с цилиндрической головкой (рисунок 3):
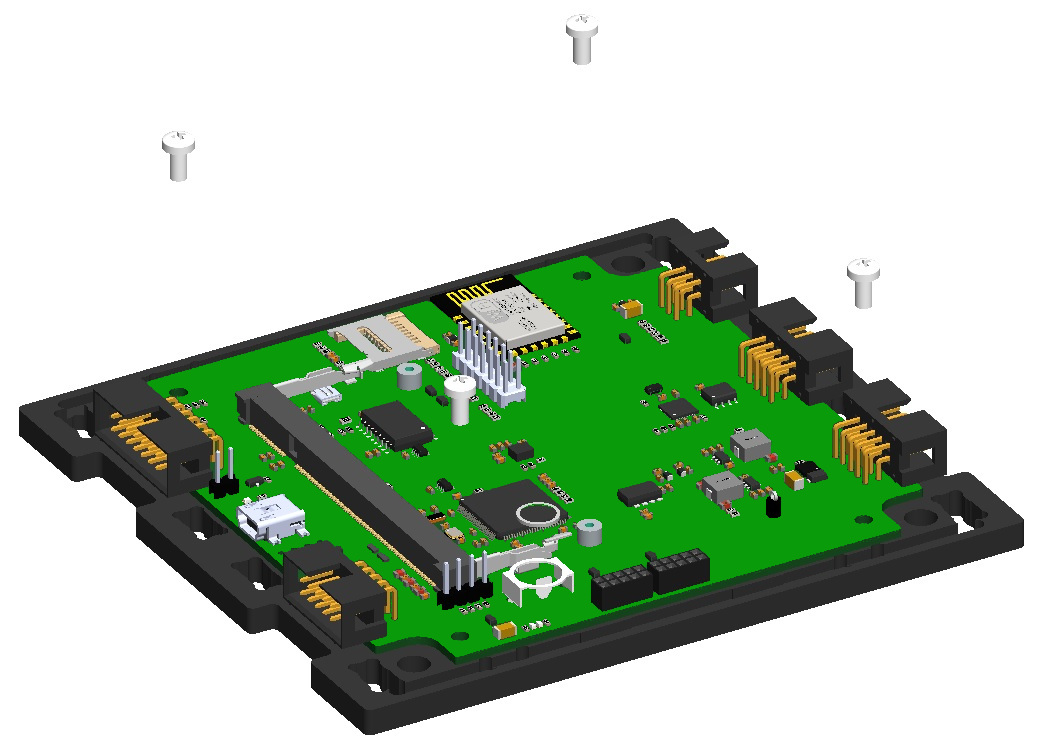
Рисунок 3. Крепление платы
3) Закрепить боковые стенки на нижнем основании. Для этого совместить выступы боковых стенок с отверстиями в основании и защелкнуть (рисунок 4):
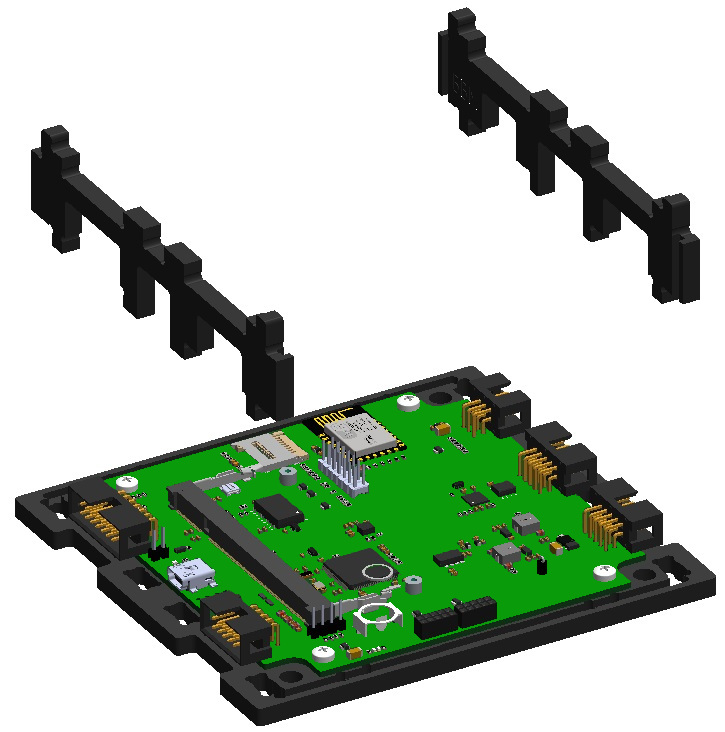
Рисунок 4. Установка и крепление боковых стенок
4) Закрепить две прозрачные панели на нижнем основании. Для этого каждую панель провести по направляющим в стенках до основания и защелкнуть. Соблюдать расположение и ориентацию панелей с осями как на рисунке ниже (рисунок 5):

Рисунок 5. Крепление двух прозрачных панелей
5) Прикрепить верхнюю крышку (обозначена: БВМ↑) к собранному корпусу. Для этого совместить вырезы на верхней крышке, выступы двух стенок и двух панелей, и защелкнуть, приложив усилия (рисунок 6):
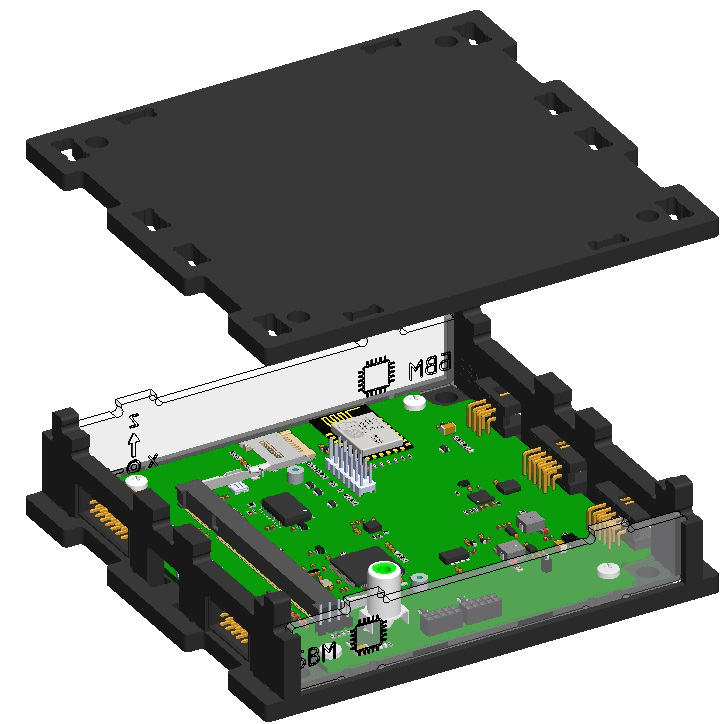
Рисунок 6. Установка верхней крышки
Так выглядит собранный модуль БВМ (рисунок 7):
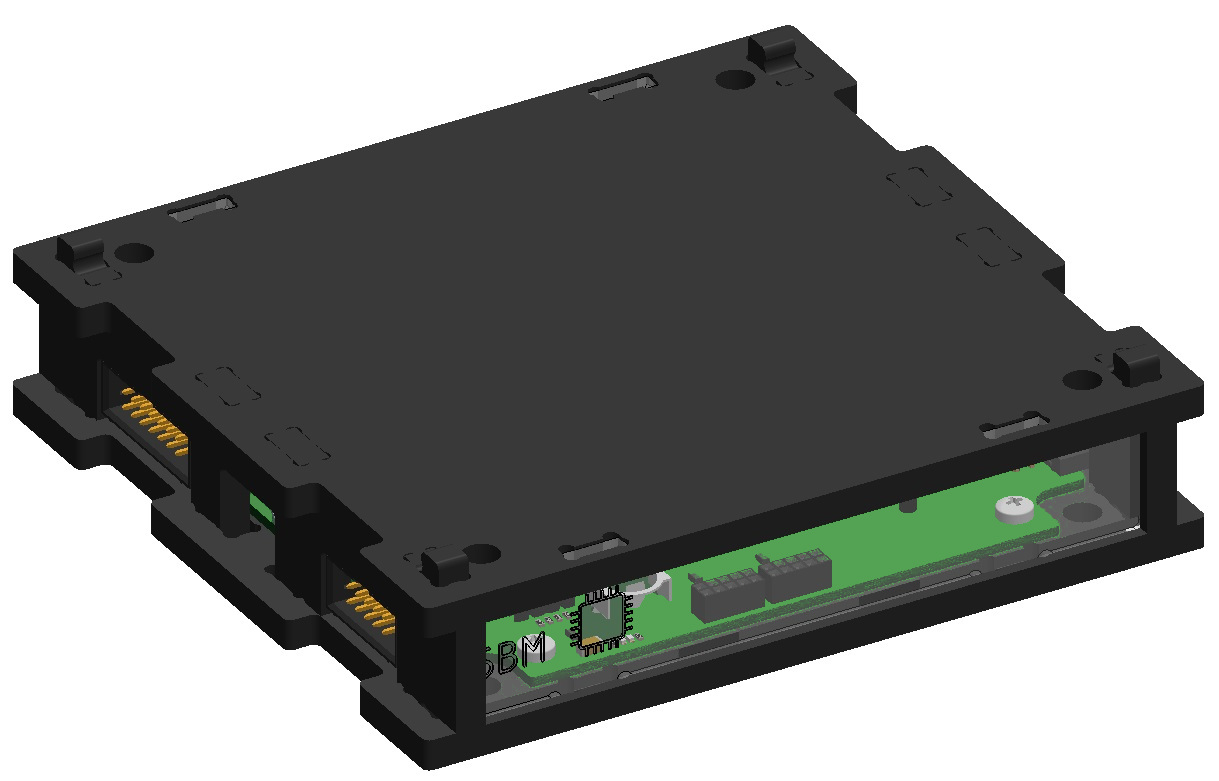
Рисунок 7. Собранный модуль БВМ